Paso 1:
En este proyecto la aplicación que estoy usando es Rhino. Sin embargo la técnica y herramientas que se utilizan aquí se pueden encontrar en paquetes de modelado más sólidos como Inventor, Solidworks, Vectorworks, Sketchup y 123D. (Tenga en cuenta que la superficie base de modelado de aplicaciones como Maya, 3DSMax, Blender puede no funcionar bien con este flujo de trabajo de modelado y resultado puede variar.)
Romper el proceso de modelado:
Las técnicas de base que se utiliza aquí es bosquejo (2DOutline), extrusión y resta (corte o diferente).
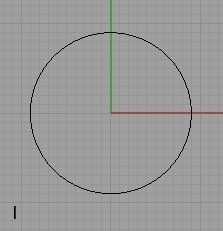
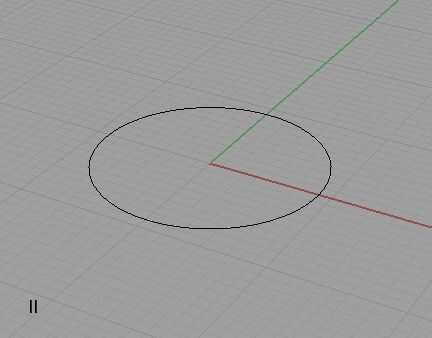
Bosquejo es un esquema básico 2D de la forma que desea crear. Así que en este proyecto el 2D dibujo/esquema es una forma de círculo (fig I, II). Cuando se dibuja un boceto sientan en un X, Y, eje Z en el espacio 3D para hacerlo fácil de entender podemos pensar esto como mirarlo desde la vista superior, frontal y lateral.
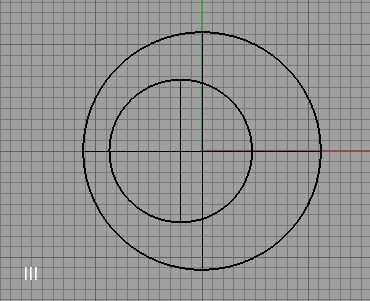
En (fig I) se puede ver estamos mirando en el círculo de la vista superior y en la (fig II) la vista se ajusta a un ángulo 3D para proporcionar profundidad y perspectiva de la vista de esto nos ayudará a ver la 2DSketch del círculo como se sienta en un espacio 3D. Ahora un segundo círculo más pequeño está dibujada (figura III) asegurándose de que el segundo 2Dsketch se dibuja desde el punto de vista el círculo inicial fue dibujado en la tapa, frente, lateral y no en cualquier otra vista como esto puede distorsionar el resultado.
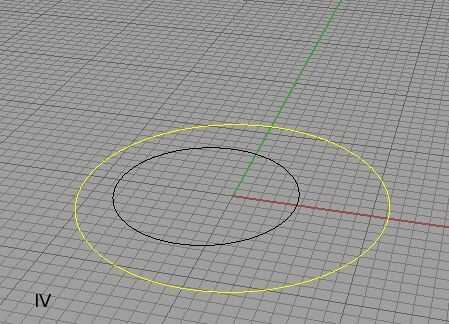
Después de esto podemos ajustar la vista 3D ángulo perceptivo para comenzar a modelar. (figura IV)
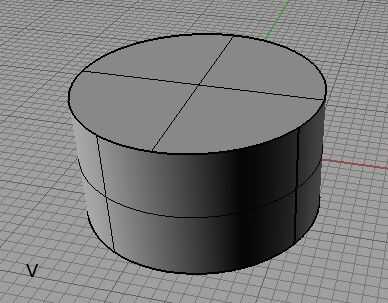
Extrusión es básicamente la adición de volumen a los 2Dsketch, (fig IV) el círculo externo es seleccionado indicado por amarillo. Cuando sacando le control a mano alzada la altura de la extrusión por vía control del ratón o introduzca una altura específica mediante un cuadro de diálogo. La altura introducida aquí es de 4 mm. (según el software de este cuadro de diálogo podría ser un pop up, dentro de un menú desplegable menú o un cuadro de menú, etc.)
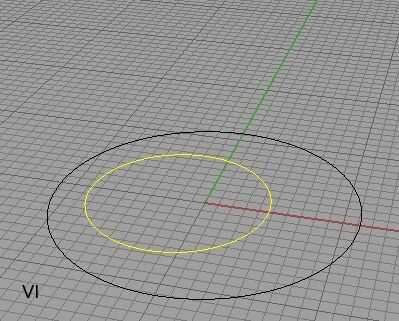
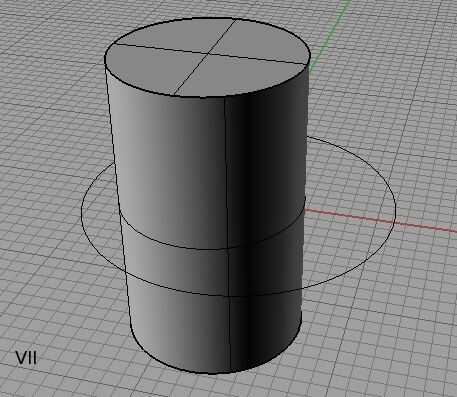
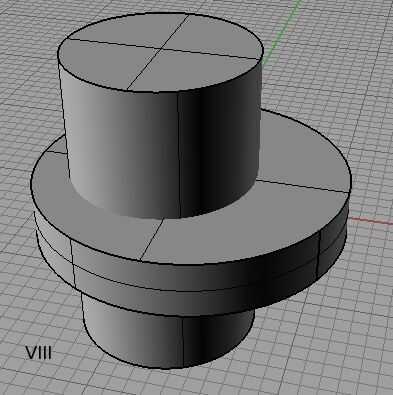
(Figura VI) el círculo más pequeño está seleccionado y sacado que resulta en un cilindro más pequeño (Figura VII) y el ratón se utiliza para controlar la altura. Cuando se sacan ambos 2Dsketch círculo el resultado pues mira como (figura VIII) las 2 partes son todavía independientes uno del otro y todavía pueden ser movidas alrededor y ajustadas.
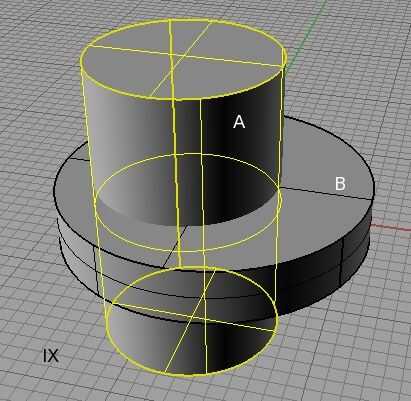
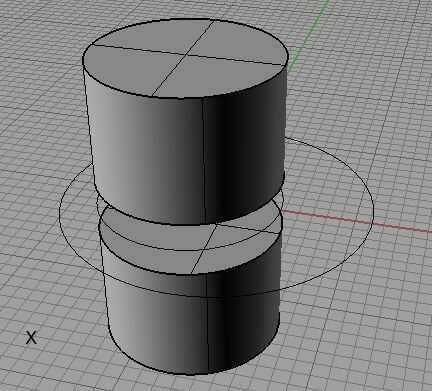
Restar (corte, diferentes) son el mismo proceso. Como su nombre indica cuando se utiliza un restar está quitando una parte de la otra. En parte (Figura IX) una selección amarillo primero se recoge a continuación la parte B se ha seleccionado. Seleccionando la herramienta Subtract (corte, diferentes), (parte B) bien sea restar (parte A) dando por resultado (figura X). Para que las partes que es elegido primer (parte A) voluntad de permanecer y de las partes es escogido segundo
(parte B) restar bien esto incluye área de (parte A) que se cruzan (parte B).
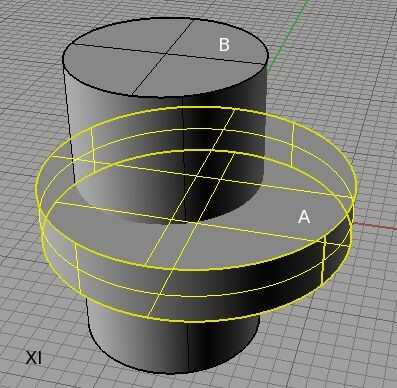
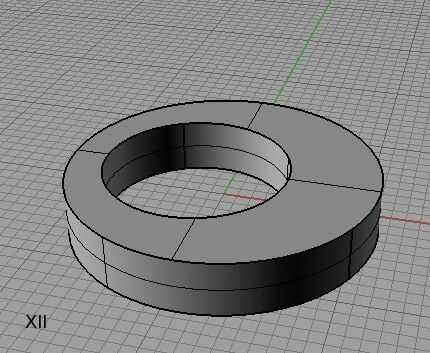
(Figura XI) el cilindro más grande es seleccionado primer (parte A) y el cilindro más pequeño (parte B) es elegido segundo. Mediante la herramienta Subtract (corte, diferentes) el resultado parecen bien (figura XII). podemos ver que el cilindro más pequeño (parte B) se resta entre ellos (parte A) intersect (parte B) resultando en un agujero.

")

")









