Paso 6: Modificación electrónica proceso de preparación

El proceso de modificación electrónica requiere entender un poco sobre el entorno de Arduino y una mano estable.
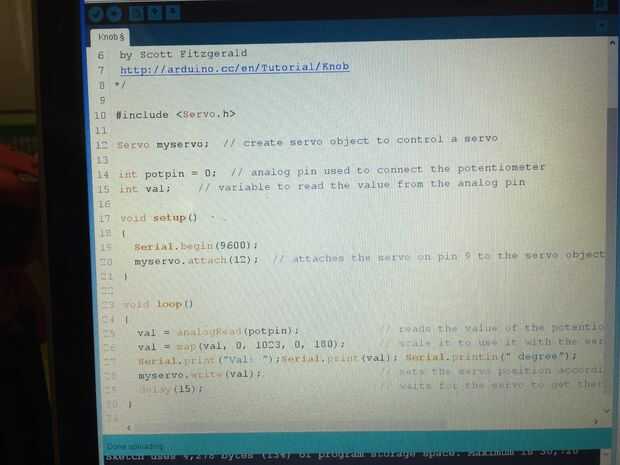
En primer lugar, necesitamos entender el ejemplo de la perilla. La función de knop mediante la retroalimentación de un potenciómetro, convertir el valor del potenciómetro (que van desde 0 ~ 1024) al valor en grados (0 ~ 180). Sin embargo el ejemplo de knop no te dice la posición de su potenciómetro así que hice un poco modificar el código.
#include
Servo myservo;
int potpin = 1;
int val;
void setup()
{
Serial.Begin(9600);
myservo.Attach(10);
}
void loop()
{
Val = analogRead(potpin);
Val = mapa (val, 223, 1003, 0, 180);
Serial.Print ("Val:"); Serial.Print(Val); Serial.println ("grado");
myservo.Write(Val);
Delay(150);
}
También necesitamos conectar un potenciómetro en el Pin analógico 1. Si usted no está familiarizado con circo de cableado, no te preocupes tengo sólo un enlace para usted. Haga clic aquí. Es más sencillo entonces usted piensa. La idea básica detrás de un potenciómetro es el resistente entre dos de sus finales.
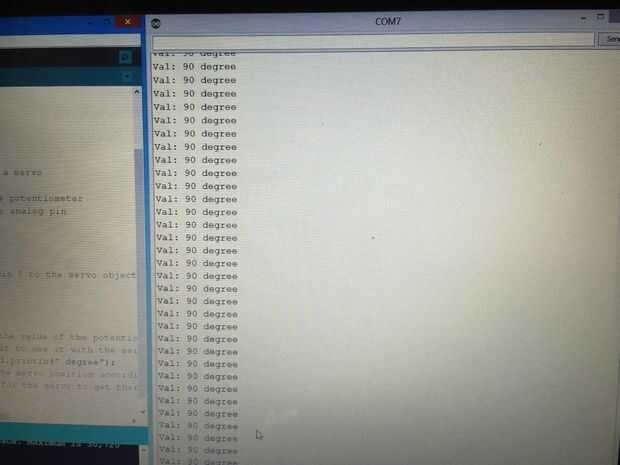
Después de cableado y cargar el código que tengo allí para ti en tu Arduino, ahora haga clic en el icono Serial monitor en la esquina derecha arriba (una lupa mini). Debería ver algo como la tercer foto, ahora el potenciómetro para volver a 90 grados en valor. Y esta es la única vez que tendrá este potenciómetro.
Consejo: Por favor vea el video de la siguiente parte, la torre de servo activa después de subir el código a tu Arduino por lo que es crucial que tu torre de servo está asegurado.

")






")

")


