Paso 3: Soldar el blindaje del Zumo
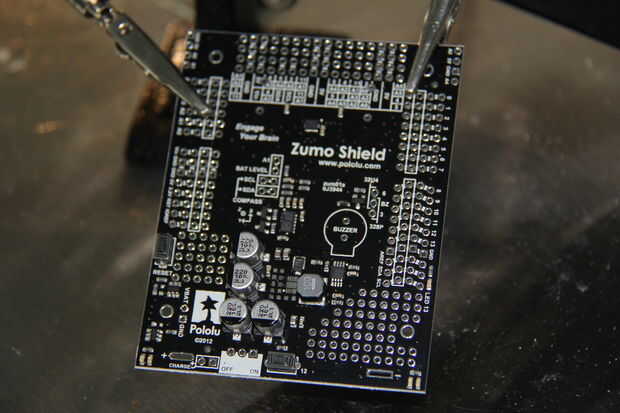
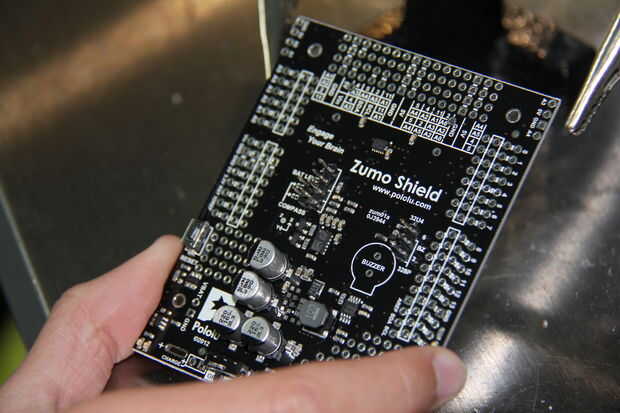
Sacar el Zumo Shield PCB y todos los componentes electrónicos (interruptor, botones, encabezados, etc.) que van con él. Enchufar el soldador y si tienes un hierro de temperatura variable, temperatura entre 350C - 400 c (660F - 750F). Coge una pequeña longitud de la soldadura (que plomo!) y poner el escudo de Zumo en un tornillo de banco o de tercera mano.
Si no sabes soldar, eso está bien! Dirígete a este impresionante tutorial para aprender!
- Poner los dos pulsadores en los agujeros correspondientes y voltee el PCB.
- Los cuatro orificios de cobre total de la soldadura.
- Cortar las puntas con su cortador diagonal.
- Posicionar el conmutador de la PCB en los agujeros de cobre correspondiente y voltee el PCB.
- Los tres agujeros de cobre de la soldadura.
- Cortar las puntas con su cortador diagonal.
- Poner el timbre en los agujeros de cobre correspondiente y voltee el PCB.
- La soldadura de los agujeros de cobre total de zumbador.
- Cortar las puntas con su cortador diagonal.
- Utilizando sus pinzas, cortar el jefe del pin de uno 10 de hombre, 8 pin macho encabezados (2) y jefe masculino del pin 6 de la franja de cabecera masculino. Ahora, poner las cabeceras masculinas en las cabeceras de pin Arduino Leonardo.
- Voltee a la Arduino Leonardo y ponerlo en el Zumo Shield PCB (los pernos que entran la Arduino Leonardo son delineados con una línea blanca).
- Voltea todo el paquete (Leonardo y Zumo protector) y todos los agujeros de cobre de la soldadura con una cabecera masculina sobresale.
- Cortar todos los cables con su cortador diagonal.
- Tomar a la Arduino Leonardo de la PCB de escudo de Zumo, y verá que las cabeceras hombres (ahora soldadas sobre!!!) se alinean bien.
- Utilizando sus pinzas, cortar el header macho 4 pin, un 3 pin macho encabezado y jefe masculino del pin 2 de la franja de cabecera masculino.
- Poner estos segmentos masculino encabezado en los orificios del puente (en el centro de la placa). Estos nos seleccionará si queremos el zumbador incorporado, monitor de batería y brújula de 3 ejes para conectarse a Arduino o no.
- Voltee la placa y los agujeros de cobre de la soldadura.
- Cortar las puntas con su cortador diagonal.
Yay!!! Ahora que terminaste con el por-agujero de soldadura necesario para completar el chasis. Al siguiente paso para saber cómo arreglar los motores en el chasis!
