Paso 2: Solucionar el problema: teoría
¿
![]()
![]()
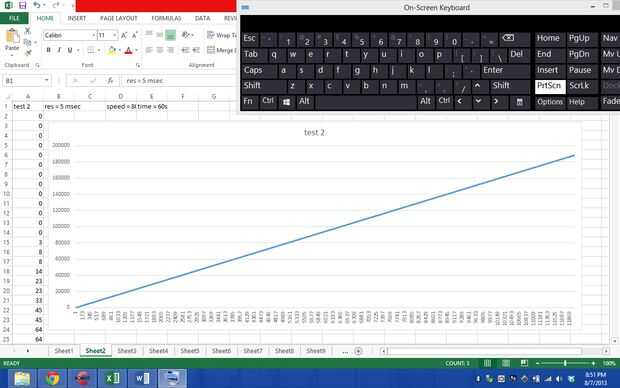
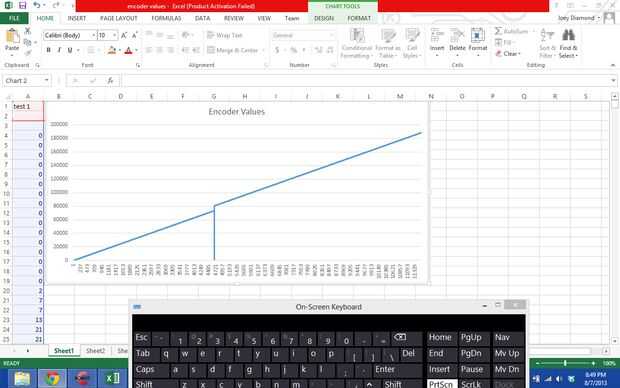
Así que si los valores sólo aparecen durante unos pocos milisegundos, pero todavía quedar atrapados y activan nuestro programa pasar, cómo ignoramos los valores que no queremos? Hay una solución simple. Podemos hacer uno de un par de cosas. el más simple (el que uso) ha tenido gran éxito para nuestro equipo. Si nuestro robot está conduciendo a una distancia de codificador, y vemos un valor superior a nuestro objetivo, esperamos unos pocos milisegundos y revise de nuevo. Esto le da a los codificadores tiempo para volver a sus valores normales. Si el valor actual del codificador es menor que el objetivo que seguimos conduciendo. Sin embargo, si el codificador es todavía mayor que la meta, sabemos que realmente tiene nuestra distancia y pasar el siguiente paso en la autónoma. La primera gráfica es lo que los valores del codificador deben parecerse, con el motor funcionando a una velocidad constante. El aumento es lineal. El segundo gráfico es muestra el valor esporádico como un pico hacia abajo. Los valores esporádicos pueden ser hacia arriba o hacia abajo, en este caso, es hacia abajo.


")
")









