Paso 2: Unir el circuito
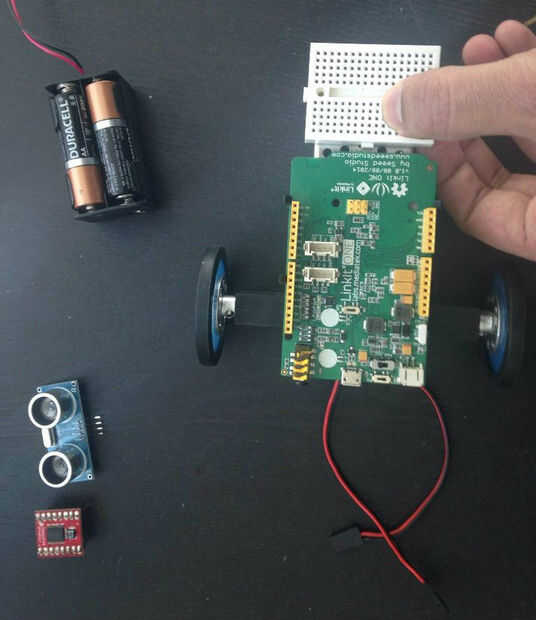
Después de ensamblar la robótica ActoBitty 2 chasis stick mini protoboard en el frente de la Junta como se muestra en la foto primera de arriba.
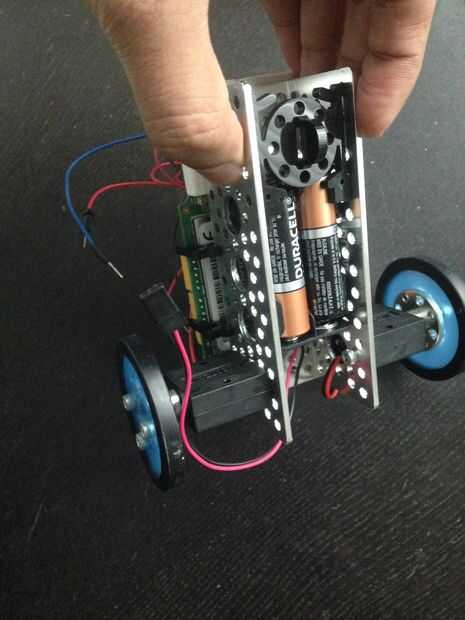
Carga del soporte de pilas con 4 pilas AA y añadir a la parte posterior como se muestra en la foto de arriba.
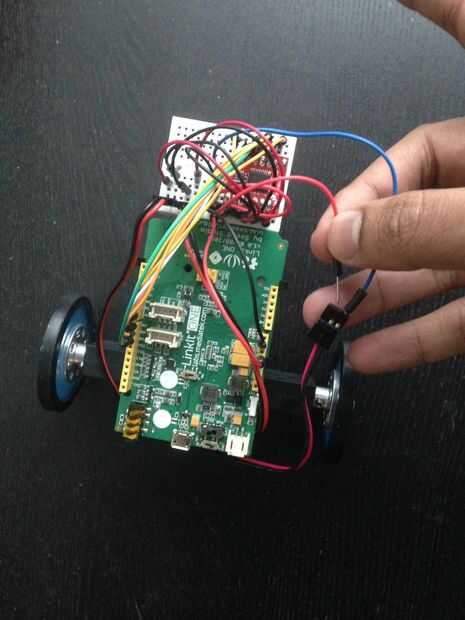
Ahora completa la conexión entre el LinkIt y el tablero de conductor del Motor en el protoboard
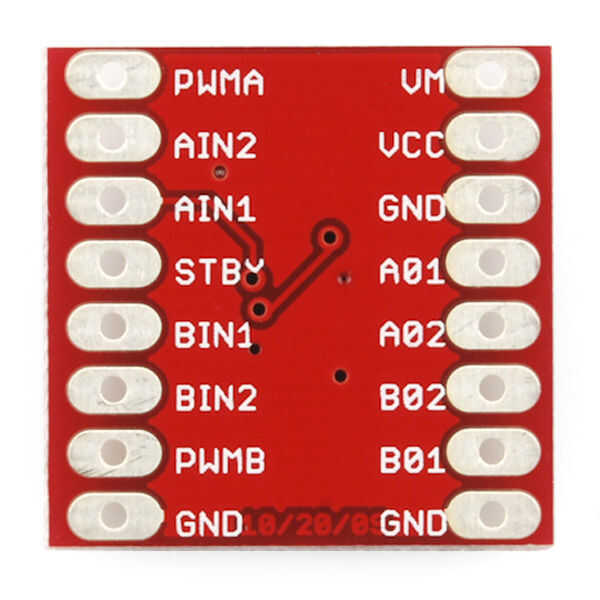
- STBY al pin 10 en el escudo de base que actúan como el modo de espera
Para controlar el motor izquierdo de la camioneta
- PWMA a pin 3 - este es un pin PWM para controlar la velocidad del motor
- AIN1 al pin 7
- AIN2 al pin 8 - ambos estos pernos decidan la dirección que hará girar las ruedas traseras.
Para controlar el motor derecho que proporciona dirección a la camioneta
- PWMB al pin 9 - este es el segundo pin PWM disponible en LinkIt uno
- BIN1 al pin 5
- BIN2 al pin 6
Completar el otro lado de las conexiones del conductor del motor al terminal izquierdo y derecho de los motores
- A01 a un terminal del motor izquierdo
- A02 a otro terminal
- B01 a un terminal del motor derecho
- B02 a otro terminal
Entonces al arrancar el motor
- Conectar VCC en controlador de motor a 5V en un LinkIt
- y VM en el controlador de motor a + ve de soporte de la batería
- TIERRA que a la tierra de la parte posterior de la batería y luego a la tierra de los LinkIt ONE(this is also referred as a common ground)






")






