Paso 1: Lo alambre para arriba.
- Motores:
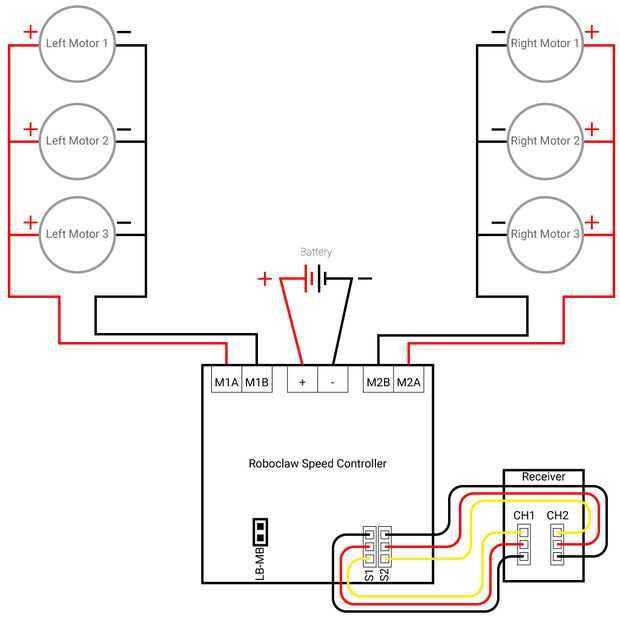
- Si tienes motor de más de 1 por cada lado: los motores de cada lado en paralelo de alambre
- Conecte los cables del motor a los terminales del controlador de Motor RoboClaw como se muestra en el diagrama
- Cepillado motores de corriente continua son reversibles. Si un lado va no va en la dirección que desee simplemente intercambiar el + y - los cables que se conecta al controlador de motor.
- Receptor:
Conecte el receptor a la RoboClaw como se muestra. El cable amarillo va hacia el borde externo de la RoboClaw y la etiqueta (CH1 por ejemplo) en el receptor. - BEC:
Buscar en el controlador de motor de 2 pines etiquetados "LB-MB" y asegúrese de que tienen un puente a través de ellas. LB-MB significa lógica batería - Motor. Con el jumper significa que en lugar de conectar una batería para alimentar la lógica de controlador de motor, puede utilizar la misma batería que está impulsando los motores. Esto se conoce como un BEC (circuito eliminador de batería). - Batería:
¡ Prepárate para cargar la batería con el regulador del motor, pero no conectar aún. Cualquier pequeña LiPo hará como que coincide con el rango de tensión de los motores y el controlador del motor y tiene una calificación suficientemente alta mAh para alimentar los motores.- Algunas notas acerca de LiPo (
Polímero de litio
) Baterías de:
- Tienen varias métricas diferentes por que están clasificados:
- Algunas notas acerca de LiPo (
- mAh (miliamperios hora): mayor ejecutará el mAh valorar más tu bot. Para una explicación más detallada véase http://electronics.stackexchange.com/questions/792... Digamos que usted desea utilizar algo parecido a esta batería de 610mAh para el carretón que tiene 6 motores. Cada motor se dibuja entre 190mA (con sin carga) hasta 250mA (carga máxima). Multiplicar por 6 y obtienes un rango de 1, 140mA - 1, 500mA absorbida por estos motores. Ya que puede aproximar tiempo dividiendo mAh de la batería mA de la carga con esta combinación de batería y el bot se podrían obtener entre 24min hasta 1 hora 52 minutos de tiempo de ejecución.
- S (Series): Esto representa cuántas células individuales están conectadas en serie. Que es estándar para cada celda que 3.7v batería 2S será 7.4v, mientras un 3s batería será 11.1v y así sucesivamente. Tenga en cuenta que una célula completamente cargada de LiPo más 4.2v cada así después de una carga que realmente te más como 8.4v fuera un 2s y 12.6 fuera un 3s LiPo.
- V (voltios): muchas veces las baterías LiPo sólo lista de la S en lugar de los voltios ya que puede ser determinado por el valor de S. Los más voltios se encenderá más rápido los motores.
- C (capacidad): la máxima velocidad segura de descarga de la batería... un 1, 000mAh batería con un C de 20 puede cargas 20 amp. Ver https://www.commonsenserc.com/page.php?page=c_ratings_explained.html para una buena explicación.

")






")




