Paso 2: Conecte los sensores de
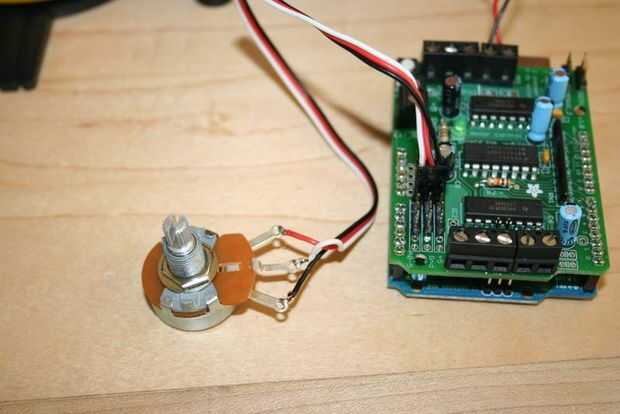




Cada bote tiene tres cables: + 5v, GND y variable. A conectarlos a los puertos de paso analógicos de escudo del Motor como se muestra, con el alambre variable más cercano a la orilla del tablero.
En el escudo de Adafruit Motor yo he soldado tres filas de encabezados pines de ruptura para la variable, + 5v y GND de pernos en el escudo aquí. Puede cortar un enchufe de los cables de puente y soldadura a cada conexión de la olla y enchufe el otro en el protector de Motor. O si usted tiene algunos cables de tres hilos RC alrededor (como estos conectores a hembra que he utilizado aquí), sólo puede cortar por la mitad y utilizarlos para menos alambre desorden y confusión. Los pernos de escudo del Motor no son absolutamente el estándar espaciamiento, así que tienes que doblarlas un poquito, pero no es gran cosa.
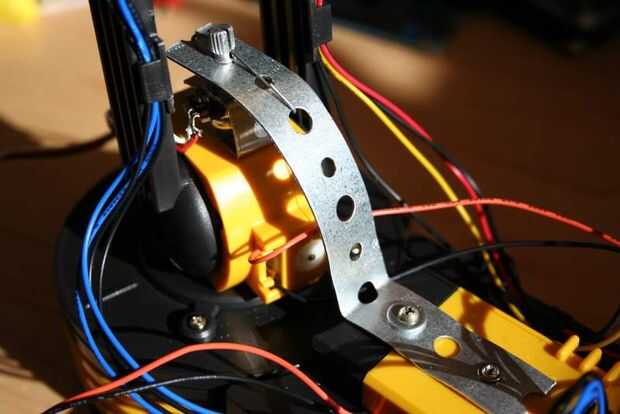
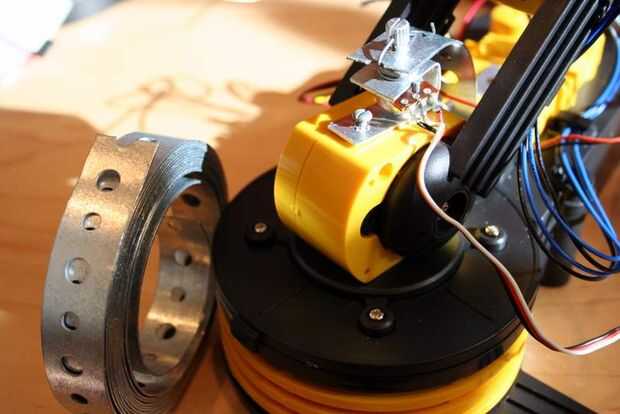
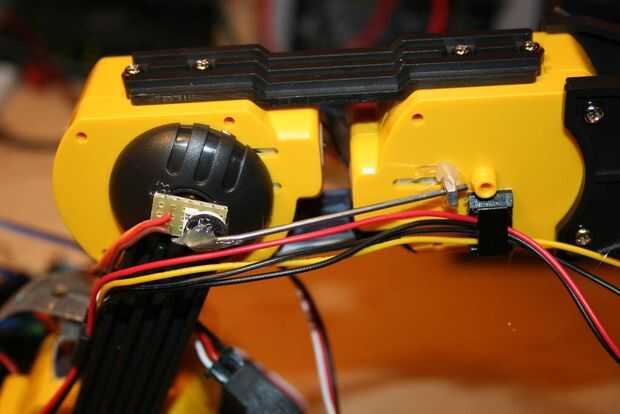
En la foto, he unido el sensor de rotación base con algún estándar 22 calibre metal plomería Cinta que se puede conseguir en cualquier ferretería. Es bastante fácil de doblar, cortar y atorníllelo en el brazo robótico OWI, usando los orificios existentes o nuevos para tornillos pequeños de metal de perforación. Usé una pequeña longitud de cable para pasar por la ranura en el bote y los orificios de la cinta de plomero para mantener fijo el eje del pot como el cuerpo de la olla se mueve debajo de él con el movimiento de la articulación del brazo robot.
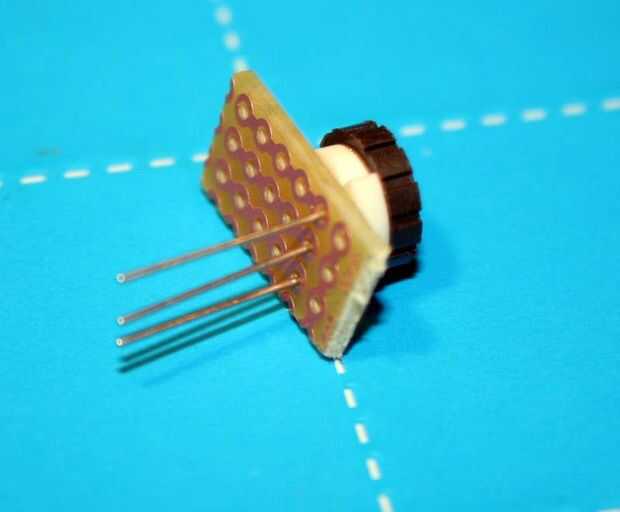
Para otras articulaciones de brazo puede soldar los potenciómetros de ajuste en el perfboard como se muestra en la imagen y caliente pegamento las articulaciones de brazos robóticos de OWI. Pegamento caliente algunos piano dura de alambre en la rueda de ajuste del trimpot y conectar a un punto fijo de referencia para ese brazo. Normalmente utilizo un perno pequeño como el punto de anclaje para el cable, como se muestra en las fotos, así que puede moverse hacia atrás y hacia adelante poco sin estresar el pegamento común en la rueda de ajuste. Es también el caso para el inferior, donde el cable puede moverse hacia arriba y hacia abajo en un agujero perforado en la base de plástico.
Nota: hay muchas maneras diferentes y buenos para conectar los sensores, estos son la forma en que lo hice. Estos funcionan bien, pero se puede montar cualquier forma que desee siempre y cuando tienen un claro rango de movimiento.



 con pfodApp")






")


