Paso 2: Calibración de la pinza
El rango de movimiento de la pinza es muy pequeño sobre 19degs en mi brazo robótico. Usted necesitará ajustar el dibujo para que coincida con el movimiento de sus garras. Esta línea de código en la parte inferior del método send_menuContents() establece el rango del movimiento de pinza.
parser.Print (F ("'2080 ' 1884 ~ % cerrado ~ 0.510204 ~-1884")); ajustar esto su garra
El 2080 es lo maximo para este deslizador. El 1884 es el minuto para este deslizador (0 a 180 degs es 544 a 2040uS) la 0.510204 son la escala y la-1884 el desplazamiento para que la pfodApp muestra de 0 a 100% para el control deslizante. Ver pfodSpecification.pdf para más detalles.
Para el brazo es necesario determinar el valor de max y min que abren y cierran a la pinza. Para ello, temporal Desconecte el brazo del servo de la pinza y conecte el cable de servo de garra a una de las otras salidas de servo. El mover el servo, usando el control deslizante de pfodApp y determinar el rango de movimiento completamente abierta y completamente cerrada.
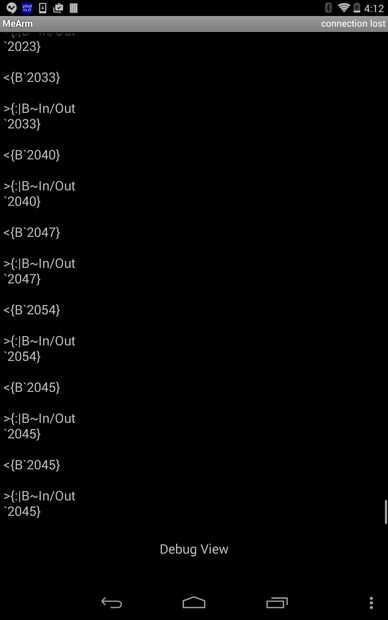
Ahora abra la pantalla de Debug en pfodApp del menú de tu móvil y podrás ver los comandos que se envían a su brazo. Por ejemplo {B'2080}
En la pantalla temporal he conectado a la garra a la In/Out unidad (D9) y 2045 es el valor máximo de agarre totalmente cerca por lo se convierte en el primer número. Ajuste de la pinza abierta y comprobar el da de la pantalla de debug, decir 1900. Se convierte en el segundo número y también el último número (el desplazamiento).
parser.Print (F ("'2045 ' 1900 ~ % cerrado ~??? ~-1900 "));
Estos dos primeros números limitan la gama de la botella en pfodApp para que nunca proba y más cerca o más Abra la pinza. Los dos últimos números son el escala y el desplazamiento que son utilizados por pfodApp para calcular lo que aparece en la pantalla. Si establece 1.0 y 0.0, la pantalla mostrará un cursor de 1900 a 2045. La fórmula utilizada es el valor de display = (ajuste deslizante + offset) * escala
Por lo que para obtener 1900 a 2045 para mostrar como 0 a 100% el desplazamiento a-1900 y la escala a 100 / (2045-1900) = 0.68966 por lo que el código se convierte en
parser.Print (F ("'2045 ' 1900 ~ % cerrado ~ 0.69866 ~-1900"));

")

: controlador del brazo robótico juego de Arcade")









