Paso 9: Montaje de las hélices sobre los ejes
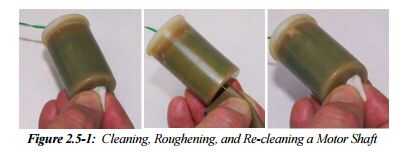

1. Limpie el eje de cada motor con un paño esterilizado (o una toalla de papel humedecido con alcohol isopropílico) para quitar cera sobrante que quede después del proceso de encapsulamiento, como se muestra en la figura 2.5‐1. Luego use un pequeño trozo de papel de lija para desbastar la superficie de cada uno de los ejes de motor (esto puede hacerse haciendo girar el eje contra el papel de lija mientras enciende la hélice mediante un cuadro de control pre‐made). Luego limpie cada eje propulsor nuevo con otro cojín del alcohol (no uno usado para quitar la cera de arriba). Limpieza del eje es muy importante en orden para que el adhesivo se adhiera a él!
2. Utilice una mordaza o alicates para sostener un acoplador roscado, como se muestra en la figura 2.5‐1.
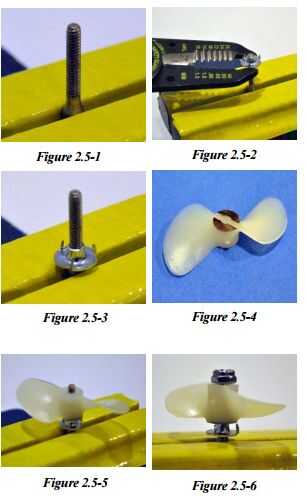
3. Enrosque la tuerca de t abajo el acoplador roscado. Un par de pinzas puede ser necesario para obtener la t tuerca starten en el acoplador roscado, como se muestra en la figura 2.5‐2 y figura 2.5‐3
4. mirar de cerca una hélice y tenga en cuenta que un lado tiene un slot (ranura), como se muestra en la figura 2.5‐4. Este es el lado que debe colocarse más cerca del motor. Coloque la hélice en el acoplador roscado con el lado de la ranura en la tuerca t, como se muestra en la figura 2.5‐5.
5. Enrosque una tuerca de bloqueo en el acoplador roscado, como se muestra en la figura 2.5‐6.
6. utilizando pinzas o ¼" tuercas, unidad de la Asamblea Junta apretando la tuerca de fijación. Un montaje final se muestra en la figura 2.5‐7.
7. Repita los pasos 2 a 6 de las otras hélices.
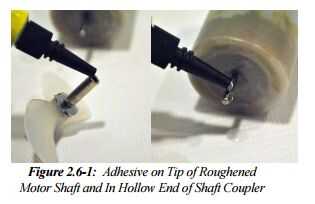
8. Coloque una gota de Super pegamento en el extremo hueco de
el acoplador de eje y en la punta del eje del motor, como en la figura 2.6‐1. Empuje el extremo hueco del acoplador de eje en el eje del motor. Una hélice completa se muestra en la figura 2.6‐2.
9. Repita los pasos 1 para los otros dos propulsores.
10. dejar a un lado sus propulsores y deje que el adhesivo se endurezca, inalterados, durante 10 minutos para llegar a fuerza de manipulación. No aplicar potencia a los motores o lo contrario tensión las uniones pegadas hasta que haya pasado ese tiempo.
10:11 minutos, hacia cada motor con la mano libre hasta el recién instalado asemblies.


")










