Paso 5: Paso 5: poner todo junto
Uno de los últimos pasos ya :)
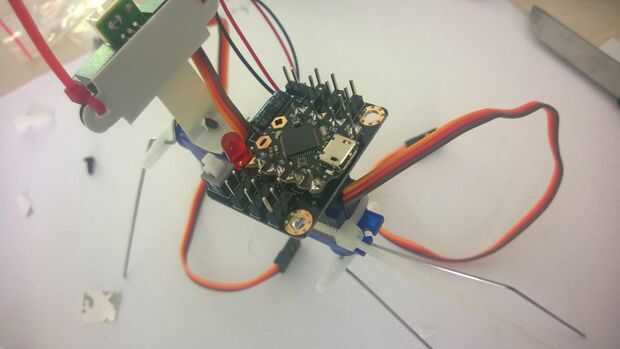
En este paso, simplemente conectaremos el Motherboard, Tarjeta madre para la robusteza sí mismo.
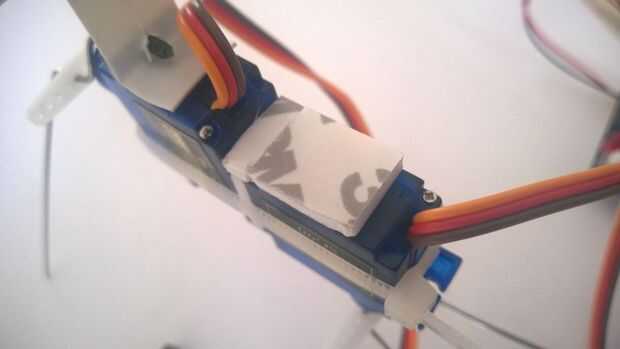
Corte un pedazo de la cinta de doble cara espuma y pegarlo a la parte posterior del robot (primer cuadro). Luego tomar su escarabajo, con el escudo de soldado sobre él, y pegúelo firmemente al otro lado por lo que permanecerá en su lugar.



")

![Diseño y construcción de una canoa de vela de estabilizadores de luz, capaz de auto-top [actualización en marzo de 2016]](https://foto.askix.com/thumb/170x110/c/3e/c3ef48e18c2c32a5b147a0240421ce3b.jpg "Diseño y construcción de una canoa de vela de estabilizadores de luz, capaz de auto-top [actualización en marzo de 2016]")







