Paso 5: Colocar los sensores y el cableado



El sensor de luz (puerto 3) se encuentra en la garra y le permite al robot saber, si la bola está o no (y puede reconocer el "color" de la bola). Los otros dos sensores se encuentran en la plataforma del "módulo de inclinación". Sensor de contacto (puerto 1) sirve como una especie de botón que presionar mientras que el sensor de sonido (puerto 2) mide el nivel de ruido (por lo que te puedo dar los comandos del robot con una palmada por ejemplo).
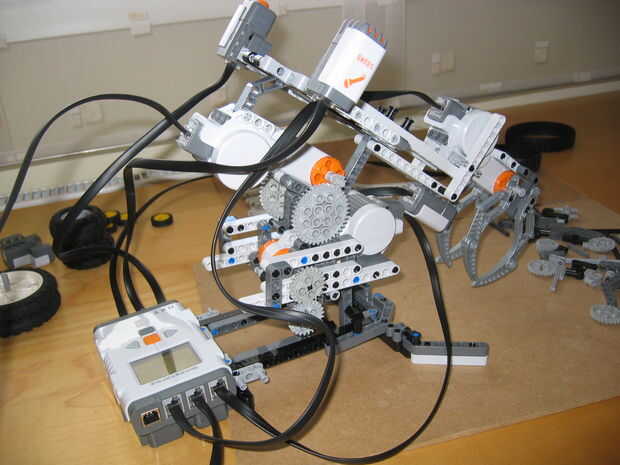
Al principio, quería incluir el sensor de los E.E.U.U. también, pero me di cuenta de que es relativamente inútil. Todavía se pueden ver en una de las fotos, pero luego me lo quitaron.
Ahora todo lo que queda por hacer es el cableado. Asegúrese de que los cables no molestan el movimiento y la función de cualquier manera. También debe considerar longitudes de cable para cada sensor o el motor.
Cableado (mi robot):
-sensor táctil -> Puerto 1
-sensor de sonido -> Puerto 2
-sensor de luz -> Puerto 3
-motor de "rotación" -> Puerto A
-"inclinación del" motor -> Puerto B
-la garra -> Puerto C













