Paso 3: Paso 2
![]()
![]()
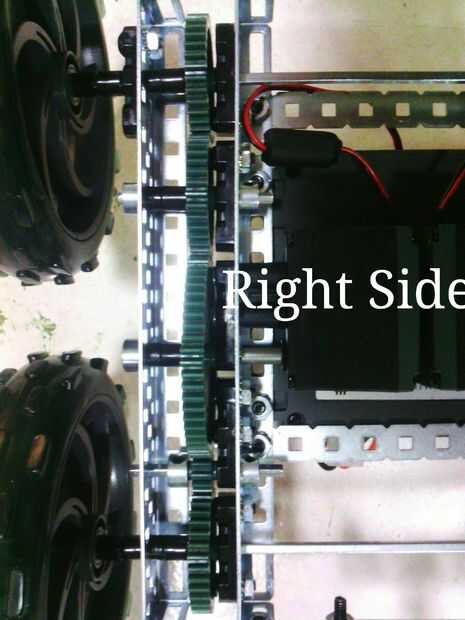
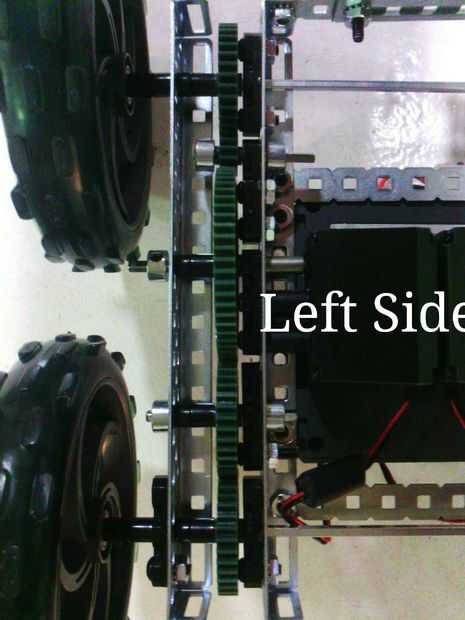
En la parte inferior del robot construir engranajes, motores y ruedas para parecerse a las fotos, conectar el 60t engranaje al motor. Asegúrese de que la relación de engranajes para las ruedas traseras es 60:12:36 (5:1:3), y la relación de transmisión para el frente debe ser 36:36:60 (3:3:5) en ambos lados a partir de la parte delantera del robot. Elegimos esta relación porque la salida de W fue 175 y el esfuerzo de torsión en el robot 1.002, que son ambos buenos números.
")












