Paso 5: Instale el servo de cuello





Quite el cabezal del
En la parte inferior de la placa superior, desenrosque la articulación del cuello (el tornillo que atraviesa el engranaje) y retire el conjunto del cuello/cabeza entera. Retire el cuello / cabeza montaje del cuello conjunto desenroscando el tornillo a través de la articulación del cuello y empujando hacia fuera del eje (necesita un poco de fuerza). Soltar el cuello / cabeza de la Asamblea y ponerlo a un lado por ahora.
Con la herramienta Dremel, quitar todo el plástico sobrante de la debajo de la placa superior (teniendo cuidado de no eliminar los orificios de montaje de la placa superior, o el soporte de brazo los agujeros de montaje) y crear como plano un área alrededor del agujero del cuello como sea posible. Además de la limpieza, seguir adelante y ampliar el agujero del cuello para ser un círculo completo, suficiente para un estándar de servo de hornos para caber a través, pero no tanto que se adapta a la articulación del cuello a través de.
Crear un montaje de servo
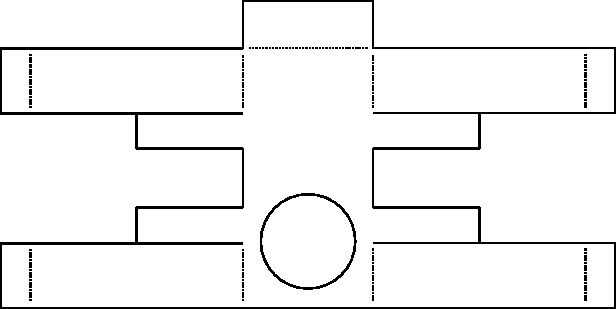
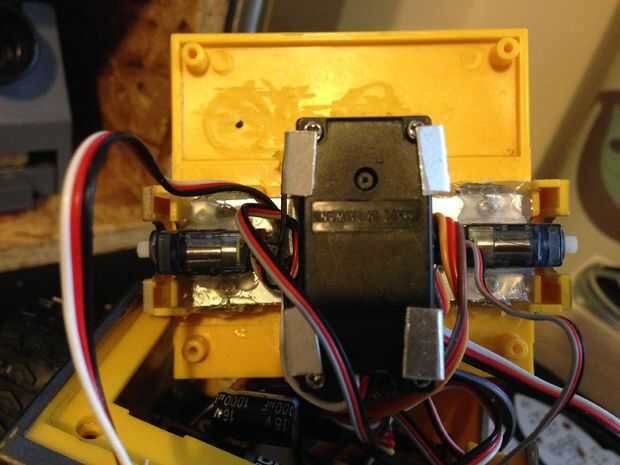
Con el fin de mantener la articulación del cuello al ras con la placa superior, vamos a crear un soporte para sostener el servo un poco lejos de la superficie. Use la plantilla adjunta para cortar de algún metal fino (yo usé una vieja sartén camping) una forma de soporte y curva redonda su servo, usando una brida de plástico para mantenerlo ajustado contra el servo. Utilizando los orificios de montaje tornillos del brazo original, coloque el soporte y doblar ligeramente hasta que el servo se coloca centralmente en la abertura de la placa superior. Si yo estaba haciendo esto ahora, probablemente crearía una parte impresa 3D, pero esto fue lo más fácil de hacer en el momento.
(Nota puede que necesite cortar los agujeros mounding en el servo del sí mismo como estos probablemente bloquearán la parte posterior placa al intentar volver a conectar más tarde, por lo que sería más fácil hacer esto).
Fijar la articulación del cuello
Para fijar la articulación del cuello, la base de la escalera común del cuello se muelen y crear un agujero central a través de la base para ser capaz de localizar un tornillo de horn de servo a través (necesita contador hundirlo para que no nos impide el cuello de montaje en más adelante). A continuación, tomar un cuerno del servo estándar ronda y crear una línea de corte con el orificio en el cuello para pasar los alambres a través. JB de soldadura el cuerno del servo en la base del cuello común. Una vez seco el tornillo de la articulación de cuello para el servo utilizando un tornillo de servo estándar y compruebe que gira libremente.













