Paso 1: Hacer el aparejo



Materiales:
~ 2 de la gaveta. Éstos deben ser del tipo que no se desintegraría cuando no realmente atrapada dentro de un cajón. Tengo un par de 18" unos en Home Depot por $14.
~ 1 bisagra grande. Los agujeros en esta bisagra que se alinean con al menos dos de los agujeros de las guías para cajones.
~ 4 tornillos, 4 tuercas y 8 arandelas. Para conectar los corredores de la bisagra y del cajón. Los pernos deben ser bastante cortos (~ una llave. Para apretar los pernos.
~ Un C-clamp. (Eventualmente) poner el aparejo a una mesa u otra superficie horizontal.
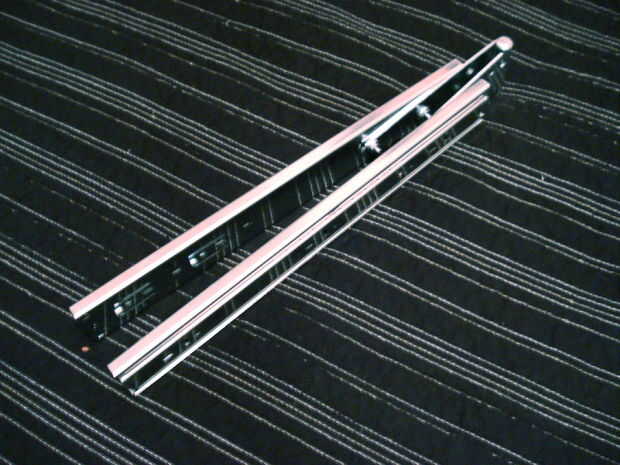
Abra uno de los corredores del cajón. Línea de un lado de la bisagra con los orificios en el extremo ancho del corredor de cajón. Emperne los dos juntos, asegurándose de colocar una arandela a cada lado. Repita con el otro corredor del cajón y otro lado de la bisagra.
Felicidades, estamos todos listos con este paso.








![Trepak [del Cascanueces] 01'17 "](https://foto.askix.com/thumb/170x110/0/95/09529f6ad4e5534c7d865d8c9cd35fe6.jpg "Trepak [del Cascanueces] 01'17 \"")




