Este instructable es controlar cualquier serial robot controlado por el uso de la voz! Le mostrará el sketch de Arduino para el robot rover y el Microsoft Visual Studio C# aplicación de windows forms. Esta es una tarea muy sencilla y te adjunto mi co
que tenía que hacer algunas investigaciones en silla de ruedas inteligente tecnología y qué mejor manera de hacerlo que en una silla de ruedas real?Bueno, la mejor manera era upcycling 3 roto sillas de ruedas en un trabajo basado en la silla de rueda
ADVERTENCIA: ESTE INSTRUCTIVO CONTIENE UN SUPER IMPRESIONANTE CONTENIDO ASÍ TENGA EN CUENTA.¿Has alguna vez has querido hacer robot súper impresionante o rover controlado inalámbricamente con tu dispositivo móvil?¿Alguna vez has querido hacer algo mi
ADVERTENCIA: HACER SU COMPUTADORA BRILLO BAJO, PORQUE ESTE PROYECTO EMITE UN ALTO NIVEL DE GENIALIDAD QUE PUEDE DAÑAR TUS OJOS :D 3:)Este proyecto participó en RoboCup 2015 Egipto Local concurso y el premio "mejor diseño" con mi equipo Abdelrahm
ser un mentor con un equipo de robótica de FRC primera (vaya equipo Beta!) es un llamado exigente. Terminan dando mucho de su tiempo, talento y energía para el equipo y la comunidad en su conjunto. Pero los beneficios superan con creces los costos.
Un LDR es una resistencia dependiente de luz y tiene muchos usos, por ejemplo, un photocel que puede encender las luces de su casa cuando su oscureciendo fuera.Una forma interesante de entender cómo funciona es leer sus valores con un Arduino.Por lo
¿qué mejor manera de empezar a experimentar con micro-controladores de código abierto ( Arduino ) y construyendo tu propio abra robot fuente ( CC (SA-de))?¿Qué hacer con el serbio?(aquí) - Cómo conectar su servio al internet y la unidad sobre un Skyp
En este proyecto que voy a describir la construcción de robots en equilibrio con Arduino.We explicó en nuestra versión anterior de android proyecto controlado. En este proyecto se moverá a nuestro control. Vamos a ir vamos a llegar a nuestro proyecto
Construir un robot de 1/20 pulgada cúbica con una pinza que puede recoger y mover pequeños objetos. Es controlado por un microcontrolador Picaxe. En este momento, creo que esto puede ser más pequeño robot con ruedas del mundo con una pinza. Cambiará
¿Vamos a construir un robot de seguridad controlado de internet?Todo lo que necesitas es:Arduino Duemilanove (alma de robot);Módulo Bluetooth HC-05 (comunicador);Serie azul de módulo LCD 20 x 4 con fondo blanco (pantalla);Sensor de ultrasonidos HC-SR
¿Lo que es capaz de?1. se puede controlar mediante gestos.2. puede enviar valores etc., nivel de batería, temperatura, distancia objeto del guante (LCD).3. puede ejecutar en ángulo de 45 grados.4. par de Tx Rx en rover y guante (para la transferencia
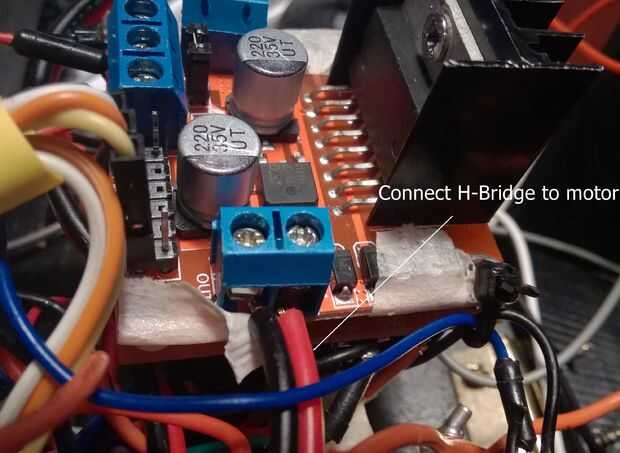
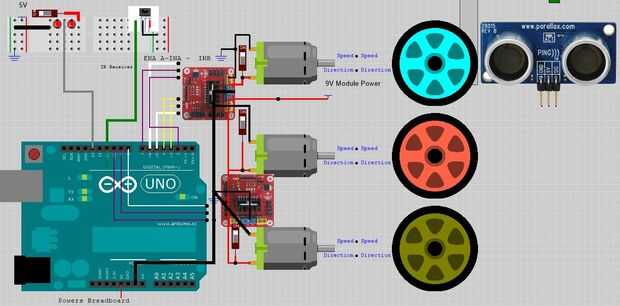
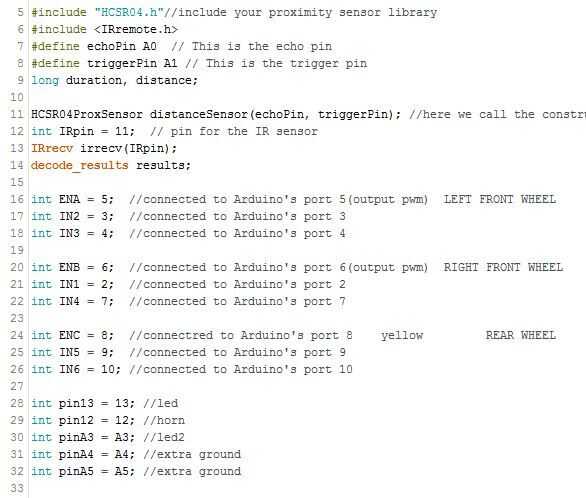
Hola todo el mundo,Este Instructables se divide en dos fases, que hace conveniente para el principiante y los diseñadores de robots intermedios.La primera fase abarca el uso de la placa de arduino nano solamente como controlador. Con esto, vamos a co
En este proyecto que quiero hacer un robot mini-sonar con arduino pro mini. Sonar o sensores ultrasónicos funcionan en un principio similar al radar o sonar, que evalúan los atributos de un destino interpretando los ecos de la radio o las ondas de so
esto es una modificación de una silla de ruedas eléctrica.La llamé "Buggy" por dos razones. #1 que mis hijos todavía pueden andar alrededor porque dejé el asiento intacto. #2 yo no he programado nada durante mucho tiempo.Tengo planes de crear &q








 con Video Stream en vivo!!")
")


")



")


