Paso 1: Hardware
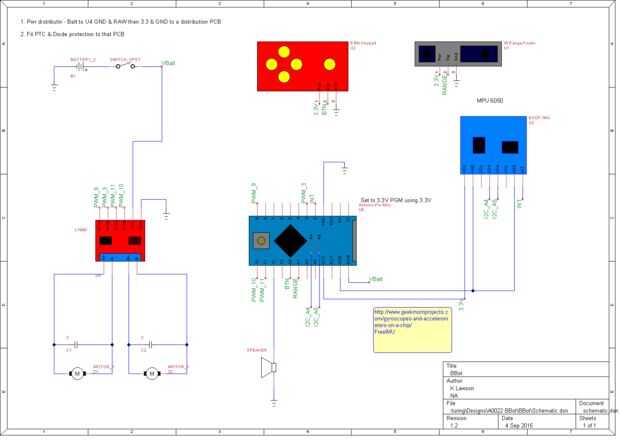

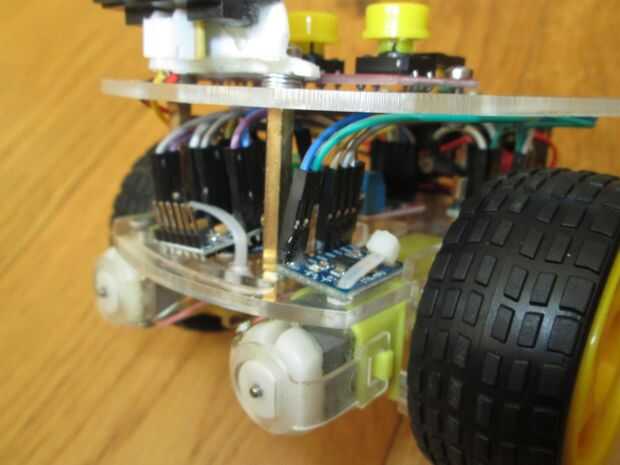

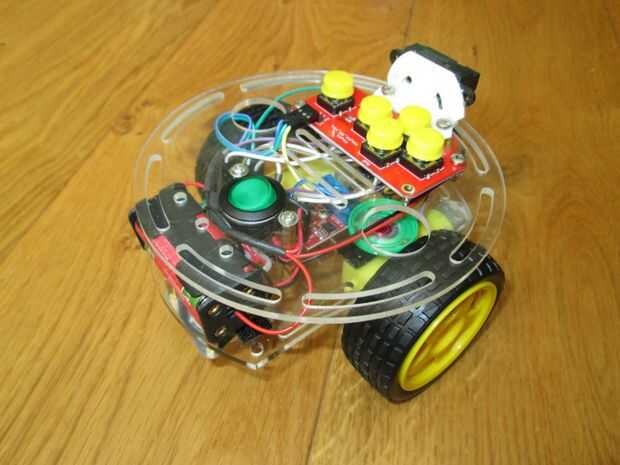
Utilice el esquema suministrado & fotos para conectar tu robot.
Motores y chasis - compré una plataforma robot barato de ebay que viene con las ruedas y los motores para este proyecto.
De Control del motor - un L9110 se utiliza para controlar proporcionalmente los dos motores, he añadido 2 condensadores para reducir el ruido también. Pueden controlar los motores hacia adelante o hacia atrás. El software escala los motores para ser más o menos lineal y opere en su región lineal sólo que es algo así como el ciclo de trabajo 20-80%.
Control de robot - esto se hace con un Arduino mini pro. Necesita un 3.3V versión o una versión que puede ser 3.3/5V y luego ponerlo a 3.3V. Durante el desarrollo tenía un plomo programación unida a la tapa del robot. Si usted está pensando de usar una versión de 5V con un LDO ser cuidadoso de la tensión droput, en el chip son ultra bajo de la salida que es útil cuando se cargan las pilas para mantener 3, 3V.
Entrada de mando - esto viene de un teclado analógico que tiene 5 botones, cada botón salidas de diferentes tensiones en la entrada al pulsar de la analógica de Arduino.
Evitación del obstáculo - esto se hace usando un telémetro 2Y0A21 sharp F 39 IR, que se alimenta en la segunda entrada analógica Arduino.
Energía - la unidad es alimentado mediante baterías de hybrio 4xAAA. Esto constituye la fuente no regulada que se alimenta el control del motor. El resto de los dispositivos son accionados por un 3.3V regula la fuente que se genera en el Arduino mini pro. Hice un pequeño tablero de distribución de energía que fue alimentado a través de un interruptor que me ayude a ruta de la energía en el dispositivo. Tiene un LED verde en él para mostrar cuando se acciona. Un interruptor controla el poder.
Audio - un altavoz proporciona información audio sobre estado IMU y pulsar un botón. Cableado - he utilizado 2,54 mm encabezados y conectores de enchufe para conectar todo.
Fijaciones
He utilizado ataduras y 3mm las tuercas y pernos para asegurar la mayoría de las cosas. Un protector de la toma de corriente se utiliza para hacer el telémetro Monte. arandelas de 3mm se utilizaron donde necesitaba cosas de espacio y donde tenía que pegar de Araldite solucionará algo.
IMU
Yo uso y MPU 6050 6 DOF acelerómetro / giroscopio para asegurarse de que el robot mantiene un rumbo. El acelerómetro no hace realmente nada.


")
")

![Automatización Arduino! [BLUETOOTH/SONIDO/CONTROLADA REMOTO]](https://foto.askix.com/thumb/170x110/6/d1/6d187aaf48ed85847570fa5acfb5b21f.jpg "Automatización Arduino! [BLUETOOTH/SONIDO/CONTROLADA REMOTO]")






