Paso 2: giroscopio
Cada canal de giroscopio mide la rotación alrededor de uno de los ejes. Por ejemplo medir la rotación alrededor de un giroscopio de 2 ejes (o algunos pueden decir "sobre") los ejes X e Y. Para expresar esta rotación en números vamos a hacer algunas anotaciones. Primero definamos:
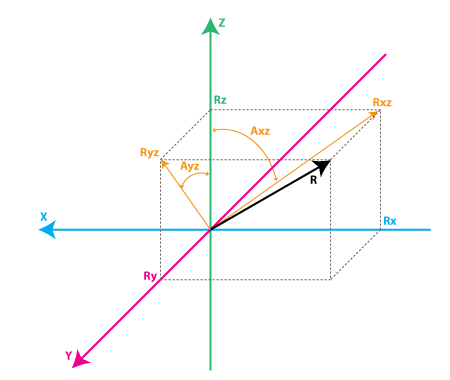
RXZ - es la proyección del vector fuerza inercial R sobre el plano XZ
Ryz - es la proyección del vector fuerza inercial R sobre el plano YZ
Desde el triángulo de ángulo recto formado por Rxz y Rz, aplicando el teorema de Pitágoras obtenemos:
RXZ ^ 2 = Rx ^ 2 + Rz ^ 2 y del mismo modo:
Ryz ^ 2 = Ry ^ 2 + Rz ^ 2
también tenga en cuenta que:
R ^ 2 = Rxz ^ 2 + Ry ^ 2, esto puede ser derivado de Eq.1 y sobre ecuaciones, o puede ser derivado de ángulo recto triángulo formado por R y Ryz
R ^ 2 = Ryz ^ 2 + Rx ^ 2
No vamos a utilizar estas fórmulas en este artículo pero es útil tener en cuenta a la relación entre todos los valores en nuestro modelo.
En su lugar vamos a definir el ángulo entre el eje Z y el Rxz, Ryz vectores como sigue:
Axz - es el ángulo entre el eje Z y el Rxz (proyección de R sobre el plano XZ)
AYZ - es el ángulo entre la Ryz (proyección de R sobre el plano YZ) y eje Z
Ahora nos estamos acercando a lo que las medidas del giróscopo. Giroscopio mide la tasa de cambio de los ángulos definidos anteriormente. En otras palabras dará salida a un valor que está linealmente relacionado con la tasa de cambio de estos ángulos. Para explicar esto vamos a suponer que hemos medido el ángulo de rotación alrededor de eje Y (ese ángulo Axz) en el tiempo t0 y se define como Axz0, luego medimos este ángulo en una posterior t1 tiempo y Axz1. La tasa de cambio se calculará como sigue:
RateAxz = (Axz1 - Axz0) / (t1 - t0).
Si expresamos Axz en grados y el tiempo en segundos, este valor se expresará en grados/seg. Esto es qué medidas de giroscopio.
En la práctica un giroscopio (a menos que sea un giroscopio digital especial) raramente te dará un valor expresado en grados/s. igual en cuanto a obtendrá un valor de ADC que vas a necesitar para convertir a grados/s utilizando una fórmula similar a la ecuación 2 que hemos definido para acelerómetro acelerómetro. Vamos a introducir el ADC a la fórmula de conversión de deg/s para el giroscopio (suponemos que estamos utilizando un módulo de 10 bits ADC, para 8 bits ADC reemplazar 1023 con 255, para 12 bits ADC Reemplace 1023 4095).
RateAxz = (AdcGyroXZ * Vref / 1023 - VzeroRate) / sensibilidad Eq.3
RateAyz = (AdcGyroYZ * Vref / 1023 - VzeroRate) / sensibilidad
AdcGyroXZ, AdcGyroYZ - se obtienen de nuestro módulo de adc y que representan los canales que miden la rotación de la proyección del vector R en XZ respectivamente en los planos YZ, que es el equivalente a decir rotación se hizo en torno a ejes Y y X respectivamente.
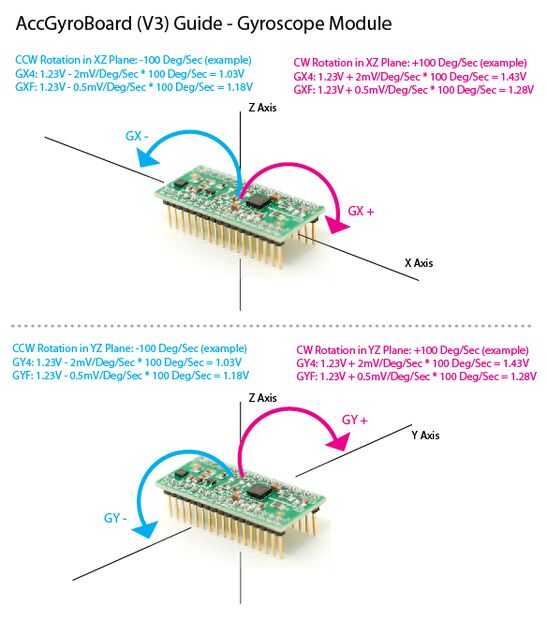
Vref - es el voltaje de referencia del ADC usaremos 3, 3V en el siguiente ejemplo
VzeroRate - es el eco-préstamo de voltaje, el voltaje que el giroscopio salidas cuando no está sujeto a cualquier rotación de la Junta de Acc_Gyro lo es en otras palabras por ejemplo 1.23V (usted puede encontrar esto en las especificaciones de los valores)
Sensibilidad - es la sensibilidad de su giroscopio se expresa en mV / (grados / s) a menudo escrito como mV/deg/s, que básicamente le dice cuántos mV aumentará la salida de giroscopio, si aumenta la velocidad de rotación de un deg/s. La sensibilidad de la Junta de Acc_Gyro está por ejemplo 2mV/deg/s o 0.002V/deg/s
Tomemos un ejemplo, supongamos que nuestro módulo ADC regresó después de valores:
AdcGyroXZ = 571
AdcGyroXZ = 323
Utilizando la fórmula anterior y utilizando los parámetros de especificaciones del tablero de Acc_Gyro que vamos a llegar:
RateAxz = (571 * 3.3V / 1023 - 1.23V) / (0.002V/deg/s) = ~ 306 grados/s
RateAyz = (323 * 3.3V / 1023 - 1.23V) / (0.002V/deg/s) = ~-94 grados/s
En otras palabras el aparato gira alrededor del eje Y (o podemos decir que gira en el plano XZ) con una velocidad de 306 grados/s y en el eje X (o podemos decir que gira en el plano YZ) con una velocidad de deg/s-94. Tenga en cuenta que el signo negativo significa que el dispositivo gire en la dirección opuesta de la dirección positiva convencional. Por Convención una dirección de rotación es positiva. Una hoja de especificaciones de buen giroscopio le mostrará que la dirección es positiva, de lo contrario tendrás que buscar de experimentar con el dispositivo y observando la dirección de los resultados de la rotación en el aumento de voltaje en el pin de salida. Esta es la mejor hecha con un osciloscopio ya que en cuanto dejas la rotación la tensión caerá a los eco-préstamo nivel. Si estás usando un multímetro usted tendría que mantener una velocidad de rotación constante durante al menos unos segundos y observe la tensión durante esta rotación, luego compararlo con el eco-préstamo de tensión. Si es mayor que el eco-préstamo de tensión significa que la dirección de la rotación es positiva.








")




