Paso 2: Arduino board entradas y salidas
![]() Salidas:
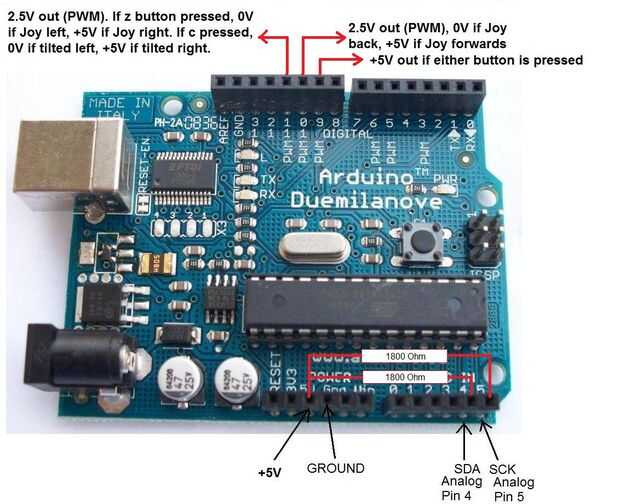
Salidas: las salidas de Arduino se arreglan como sigue;
9 Pin digital: salidas + 5V cuando se presiona cualquiera de los botones del final. Esto puede usarse como una señal de control de marcha/parada. Si controla un vehículo robot o similar, a continuación, dejando que vaya del Nunchuck creará un 0V en esta salida y así puede ser utilizado para matar a energía a los motores y así sucesivamente.
10 Pin digital: PWM (modulada de anchura de pulso) de salida en pin 10 da 2.5V la mayoría del tiempo. Nota: Esto no es un suave 2.5V sino una serie de pulsos en 500 Hz, donde la mitad del tiempo hay 0V y la mitad del tiempo hay + 5V. Si usted les alisa usando una resistencia y un condensador (llamado un filtro RC) puede utilizar la tensión resultante (ahora suavizada) como una señal de entrada de control para algún otro dispositivo (otro arduino o lo que sea). Salida es 2.5V cuando la palanca de mando en posición neutra. Sube a + 5V o cae a 0V cuando joystick
remite o
al revés.
Digital Pin 11: salida PWM (anchura de pulso modulado) en 11 da pin 2.5V más tiempo (de manera similar al Pin 11 arriba) cuando el joystick en posición neutral.
Si se presiona el botón z,
y luego joystick izquierda/derecha hará descender a 0V o a 5V. PERO: Pulsar ambos botones z
y c (
o simplemente c botón solo) luego esta salida Pin 11 se convierte en controlado por la inclinación izquierda/derecha del nunchuck (mediante el acelerómetro incorporado) y el componente de joystick L/R se desactiva. Entonces: El voltaje de salida (alisado con un filtro RC) puede utilizarse como una entrada de dirección para algún otro dispositivo. Si presionando el botón z, que dirigen con joystick, si es apretados c botón (o ambos), entonces dirección inclinando Nunchuck derecha o izquierda.

")
")
")









