Paso 7: Preparación de las juntas
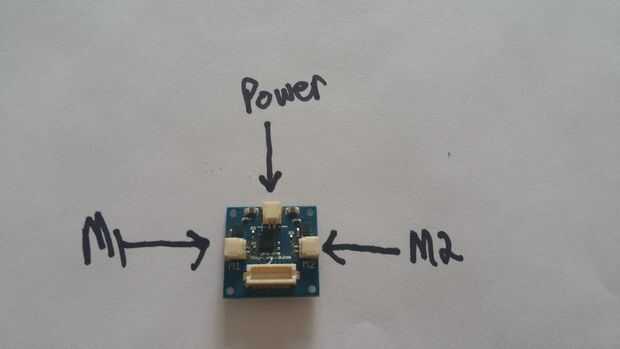
Si los tres conectores hembra de motor todavía no han sido soldados a la doble TinyShield Motor, conectar estos pines hembra a los puertos presoldados para batería, motor 1 y motor 2.
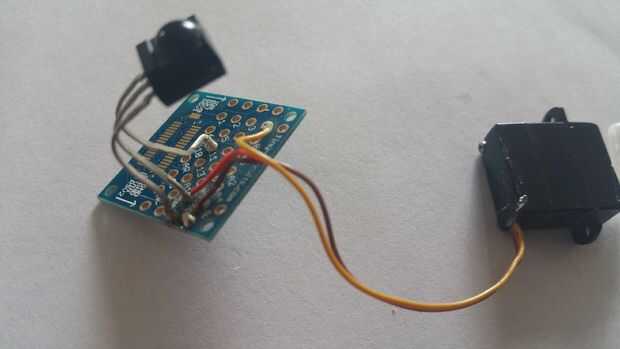
A continuación, conecte el ProtoBoard y servo motor. Conecte la línea de datos al pin 4, la línea de voltaje al pin VCC y la línea de tierra al pin GND. Asegúrese de que usar un alambre lo suficientemente largo para abarcar desde un borde de la taza de espuma de poliestireno a la otra.
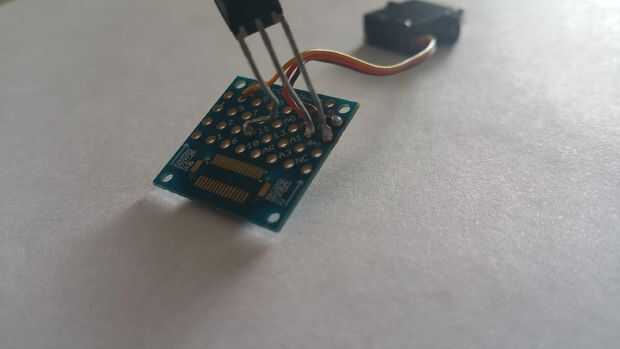
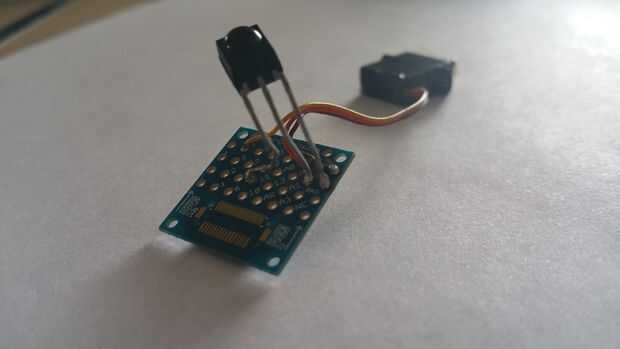
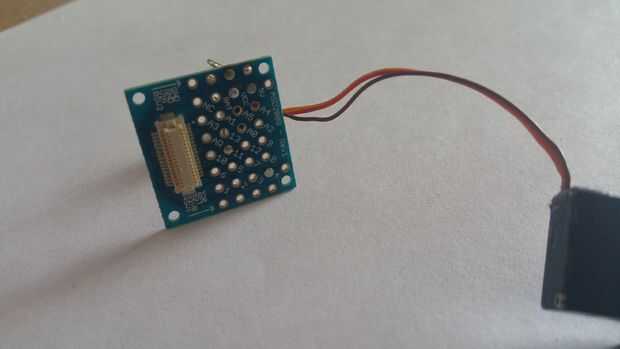
Después de conectar el motor servo, conecte el receptor de infrarrojos en el ProtoBoard así. La soldadura de la línea de datos al pin 11, la línea de voltaje al pin VCC (la línea de voltaje del servo ya estará allí; esto es aceptable) y la línea de tierra al pin GND.
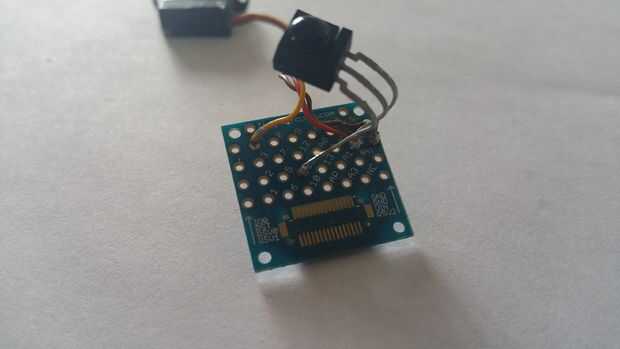
Clip extra soldadura o alambre que atravesaron por debajo de la ProtoBoard y lije. Doble el receptor de infrarrojos para que se orienta con el receptor hacia arriba y el lado plano del módulo apuntando hacia abajo hacia el ProtoBoard.