Paso 1: Buscar motores

Para hacer que el robot tendrá ruedas y motores. Existen muchos tipos de estos, pero si eres un principiante te recomiendo usando el chip los vende a usted. Chip es un sitio web de Nevada-Estados Unidos, que ofrece diferentes tipos de accesorios de robots, incluso robots todos (pero normalmente competiciones de seguidor de línea prohiben usarlos). Motores Pololu
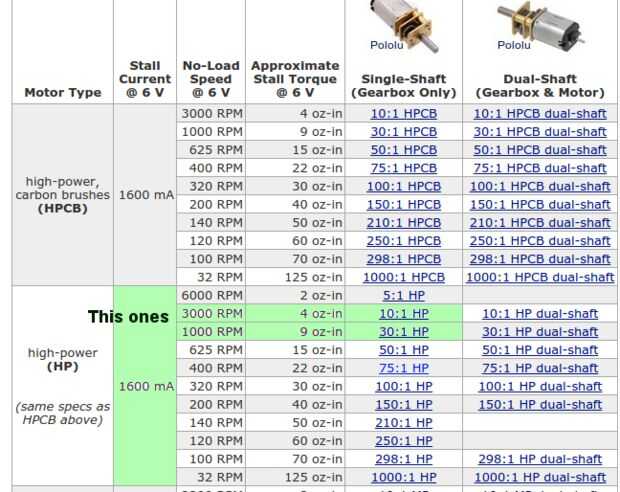
Aquí viene la decisión más importante que es que los motores y que las ruedas al utilizar. Pololu nos ofrece cuatro tipo de motores, baja potencia, media potencia, alta potencia y larga vida-alta-potencia (todos ellos funcionan a 6v y tienen las mismas dimensiones físicas). ¿Cuál es la diferencia? Los de baja potencia consumen menos energía, pero esto significa un motor peor porque vamos a tener menos velocidad o menos fuerza. Particularmente no recomiendo usar este tipo de motores que se realizan para otros propone algo competiciones de alto rendimiento. Utilizado los motores de alta potencia y alta potencia-larga vida y te digo no consumen demasiado.
La diferencia entre el alta potencia y alta potencia larga vida es que la larga duración tiene una vida útil más larga pero no tengan dándoles más de 6v y barreno pesado, mientras que la alta potencia motores pueden ocuparse de estas condiciones mejor. Realmente utilicé los motores de alta potencia para este robot porque no quiero arriesgar rompiendo mis motores. Puede trabajar durante varias horas de uso continuado sin romper aunque (algunos viejos robots con este tipo de motores han trabajado durante 3 años y más y todavía no ha roto)
¿Qué relación debe elegir? Una desmultiplicación mayor significa menor velocidad pero mayor esfuerzo de torsión lo que implica mayor aceleración, incluso aceleración instantánea con robots incluso pesados. No recomiendo usar nada más que 30: 1 cociente del engranaje porque no serás capaz de hacer un robot rápido que es nuestro objetivo (sin embargo, usted tiene que el peso del robot a menos de 250 gr), y nada menos que 10:1, porque podría ser increíble rápido motores pero no son capaces de afrontar las curvas (debido al peso de los motores ellos mismos y la inercia que genera). Así que la decisión es entre 30: 1 o 10:1, particularmente he utilizado cuatro motores de 10:1, porque medios cuatro motores del robot puede manejar mejor las curvas, pero, un robot con dos motores de 30: 1 puede trabajar también aunque quizás tendrás que darles más de 6v para lograr velocidades más altas. Con cuatro motores de 10:1 el robot puede ir realmente rápido con no más de 6.5v. ¿Sólo los motores de dos 1:10? Esto puede funcionar también, pero el robot lleva más tiempo a acelerar, lo que es malo sí, pero no es mala idea.

")











