Paso 4: Prueba de los motores
Para el motor izquierdo:
• Arduino GND a GND en EasyDriver izquierdo
• Arduino pin 11 va dir
• Arduino pin 12 va al paso
Para el motor adecuado:
• (Una de las dos patillas de tierra izquierda) Arduino GND a GND en derecho EasyDriver
• Arduino pin 6 va al DIR
• Arduino pin 7 va al paso
Asegúrese de que los dos motores paso a paso de trabajo. Escriba el siguiente código, verificar
y subir a Arduino.
/*
Manejar dos motores paso a paso con un Arduino a través de
EasyDriver v4.3 de Sparkfun
Por Ben Leduc-molinos y Dustyn Roberts
Creado: 2010.06
*/
Biblioteca de #include Stepper.h //import paso a paso
#define 200 pasos / / 360/1.8 (ángulo de paso) = 200 pasos/revolución
declarar objetos nuevos pasos de biblioteca paso a paso (uno por motor)
Right_motor paso a paso (pasos, 6, 7); 6 = DIR, 7 = PASO
Left_motor paso a paso (pasos, 11, 12); 11 = DIR, 12 = PASO
void setup() {}
establecer velocidades de motor (en RPM)
right_motor.SETSPEED(200);
left_motor.SETSPEED(200);
}
void loop() {}
cada motor de paso cada vez a través del lazo
right_motor.Step(10);
left_motor.Step(10);
Delay(10); da la oportunidad de llegar a paso nuevo el motor
}
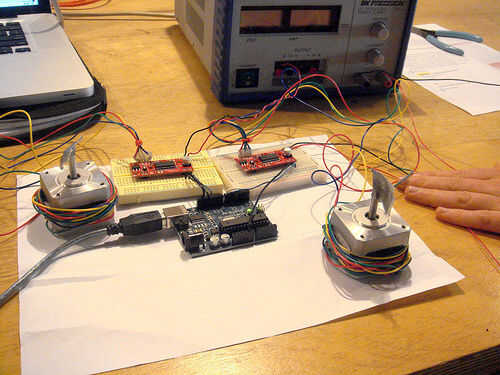
Si el código funciona, sus motores sólo deben comenzar a girar lentamente. Colocar algunas cintas
Banderas a los ejes de motor como se muestra para ayudar a indicar lo que está sucediendo.
")
")










