Paso 2: Hacerlo mover!!!!!!



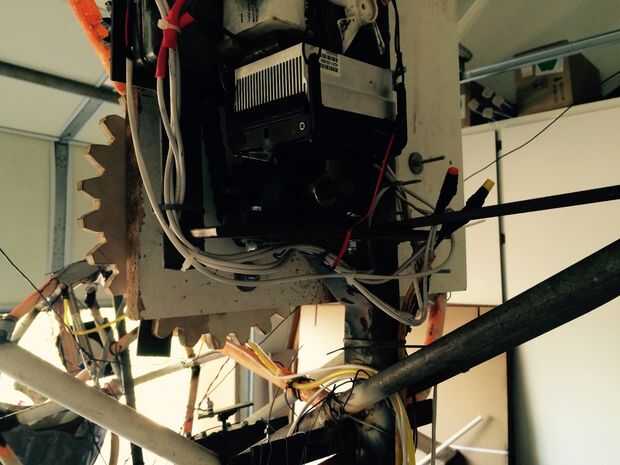

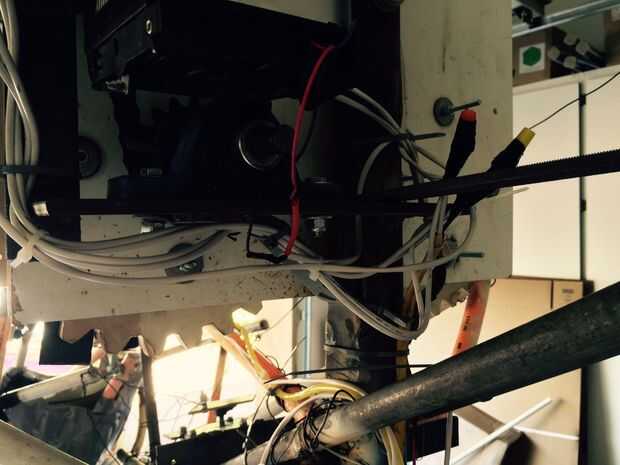







Después de que el bastidor está construido en su mayor parte, moví a todo lo que hace mover. Esto incluyó el pico neumáticamente controlado. Los ojos de LED. El cuello que da vuelta. Las alas de doble articulación y la oscilación de la cola. Sé que esto no se ve muy estético, ni es trabajo orgullosa pero estaba presionado por el tiempo al hacer este Cuervo así que corte como muchos rincones como pude. Cuando instale el cilindro, motores y LED Asegúrese de ejecutar a todos sus cables y la tubería hasta el suelo.
1. ojos: para los ojos tengo viejo luces acoplado que se conectado a 12v. Estas fueron fáciles de instalar y bastante brillantes. Suficiente para ser visto durante el día. Hice lo que pude para conseguir estas luces donde yo quería. Esto incluyó utilizando cinta adhesiva y pintura cadena palos. No te olvides addict cables y ejecutar todos los cables hasta la tierra a través de adjunta al post principal en que el cuervo está hecho.
2. pico: para que quería tener algo que acapararían cerca en lugar de oscilar el pico de la apertura y cierre. ¿Y qué mejor que la neumática? Comencé haciendo el pivote inferior de pico con sólo mi mano moviéndolo. Ajusté la fama y la cabeza hasta que me ha gustado la forma en que veía. Entonces me di cuenta de cuánto tiro necesitaba así que compré SMC NCMC075-0400 de Amazon. Funcionó a la perfección. Después llegó creé un soporte giratorio para el back-end del cilindro y conecta el pistón a la parte del pico que dejé para esto. Siempre ayuda a mirar las fotos. Hasta ahora el pico podría abrir su boca pero no cierra muy fácil así que añadido un simple resorte para retraer la boca. Asegúrese de ejecute tubo neumático junto con le cable de los ojos.
3. oscilante cuello: quería el cuello para mover para configurar un motor de 12v simple (6 RPM) con una simple manivela. Os adjunto un segmento de alambre de metal en el extremo de la manivela y el otro extremo a un lado del cuello. Esto fue muy sutil movimiento pero funcionó.
4. alas de doble articulación: esta parte era probablemente lo más divertido para crear. Quería movimiento de la vida real en lugar de solo un único conjunto de ala. Usé la aplicación de fuerza efecto movimiento de Autodesk para el diseño de las alas. Era realmente col para aprender a utilizar. Así que hice un plan rápido sobre cómo iba a hacerlo. En su mayoría estaba formado en las cosas que tenía que poner alrededor de mi casa. Utilicé una pieza de contrachapado como la principal para apoyar los motores, cadenas y mecanismos de ala. Las alas ellos mismos fueron hechas del PVC y del metal como la espina dorsal superior principal. Empecé ordenando dos rodamientos de lazy susan de Amazon. Entonces creé engranajes de madera de contrachapado con un engranaje con un eje conectado que le sobresalen sobre un pie. Los engranajes de madera entonces fueron empernados al perezoso susans con entonces fueron empernados a la parte posterior de la madera contrachapada principal. Todo este mecanismo es difícil de describir tan mirada en mis fotos ojala las describirá lo mejor. Para que las alas para moverse, usé dos poco 120v AC motores configurar en línea con uno a través de una cadena de servicio pesado. Así que tuve que poner dos disipadores de calor y dos ventiladores por motor para mantenerlos frescos, estos motores calientan extremadamente. Estos motores fueron Unidos a los piñones que condujeron a una cadena, la cadena fue unida a una rueda dentada se reunió en el eje de engranaje que se hizo anteriormente. Luego añadí un cojinete resistente para apoyar la alineación del eje. Revisa mis fotos para una explicación más detallada. Las alas se trasladó a aproximadamente 6 RPM
5. oscilante cola: cola oscilante fue creado con un marco de PVC que tenía un punto de pivote de 8 pulgadas desde la parte superior. Luego conecté una cuerda de metal con el mismo mecanismo para el cuello. Sólo una simple manivela hicieron la cola hacia arriba y hacia abajo. Esto fue hecha otra vez con el uso de un motor de 12v. Su velocidad era aproximadamente 20 RPM
Ahora sería un buen momento para probar todo. Si hay un error es mejor arreglarlo ahora. Para probar el pico de la neumático, tenía un tanque de aire comprimido en línea con un solenoide de aire de 24v que se presuriza el cilindro hacer cerrar el pico.










")


