Paso 4: Construir el circuito



Ahora esta es la parte más importante del proceso.
componentes necesarios para construir el robot:
- 1 x LM358-comparador
- 1 x MSP430G2452-microcontrolador
- 1 x L293D-controlador de motor
- 1 x 8 pines & 16pin 20pin IC base
- 3 x 10 k
- 1 x LDR
- 1 potenciometro de 20 k de x
- 1 x LED rojo pequeño
- 1 x 7805
- 1 interruptor micro x
- diodo 3 x 4148
- 1 x 100-1000uf condensador
- motores 2 x 60-500 rpm
- 2 ruedas de x
- 1 x ruedas de ricino / rueda la bola
- tira de Berg
- cables de conector de tira de Berg
- prefboard (mina trataba de 7x12cm)
- ESTAÑO alambre (calibre 28) u otros cables según su método de construcción de la PCB
- madera prensada
- pegamento caliente
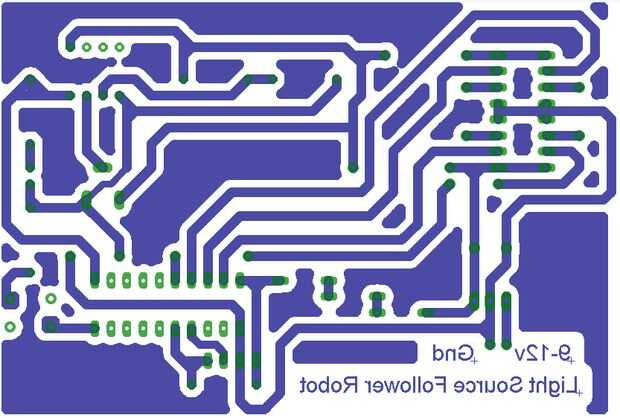
Si tienes alguna experiencia en fabricación de placas de circuito impreso puede utilizar el archivo adjunto águila.
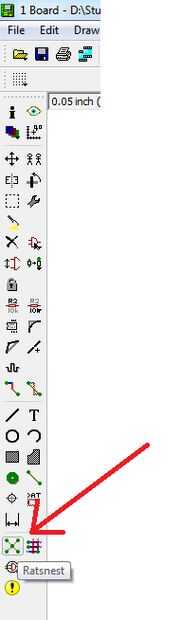
junto con los archivos de diseño, he subido los diferentes puntos de vista de la PCB, para ayudarle a colocar los componentes correctamente. al abrir el archivo, no olvide hacer clic en el botón 'ratsnest' para llenar los boquetes entre las líneas. (ver imágenes)
Cruz Compruebe la PCB de diseño con el diagrama del circuito de su propia antes de implementar ti, porque yo he no grabado al agua fuerte la placa yo.
quienes son nuevos en el circuito de construcción, se pueden utilizar muchos métodos para hacer el circuito, le estoy dando a la vista de los métodos, debe buscar el método que más le convenga:
- diseño
- en este método, hacer el circuito en el protoboard, colocar componentes en el protoboard y conectarlos a través de cables.
- Este método es útil para las personas que no son buenas con soldadura
- Este es método inestable
- se pueden reutilizar los componentes de otros proyectos
- Yo prefiero no usarlo porque el circuito es bastante grande para el diseño y usted puede terminar confundiendo a ti mismo
- pero su si bien usted desea controlar sus componentes antes de realmente hacer el PCB
- en este método, impresión el diseño del circuito (desde el archivo pcb.brd) en un papel
- transferir la tinta a un PCB plateado cobre
- poner la placa en una solución ácida para en algún momento
- Agite la solución de acción rápida
- Limpie la placa con agua, ahora cobre no deseado se consigue disuelto en el ácido y llegaremos a nuestras pistas
- sacar la tinta de las pistas
- Taladre los agujeros
- montaje de los componentes
- en este proceso, sólo puede enviar el diseño del PCB en línea y enviará el PCB a través de mensajería/correo.
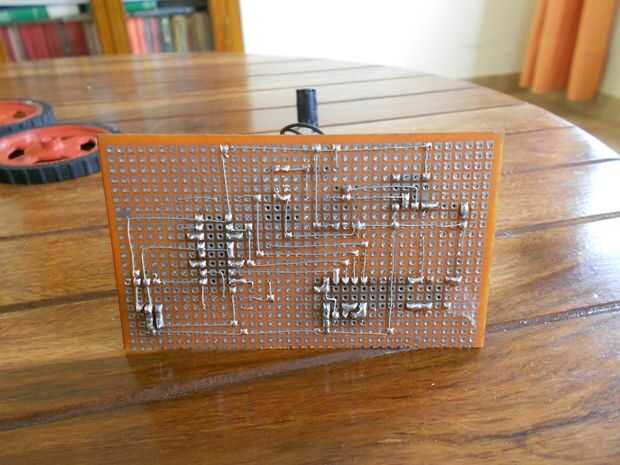
- en este proceso se crea su PCB utilizando PCB puntos.
- a diferencia de mí, a través hacia fuera de la internet personas no tiene PCB limpio usando este método.
- así que estoy pensando en hacer un instructable sobre esto pronto.
- pero tienes buena idea ver las imágenes.
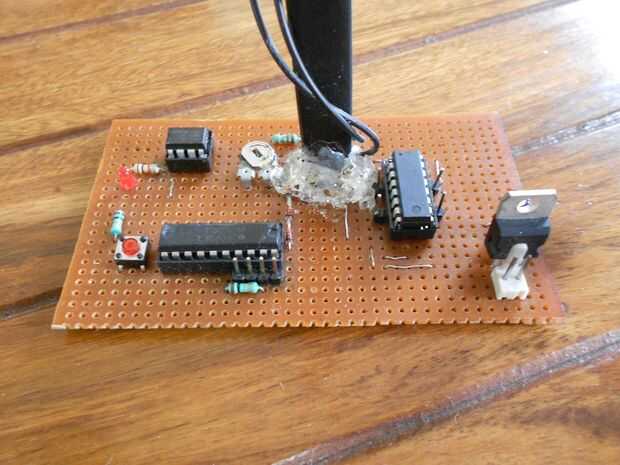
- usé hilo de estaño para hacer pistas en las placas PCB.
- puede que necesite un poco de práctica para hacer tal PCB limpia, pero su no tan difícil de hacer.
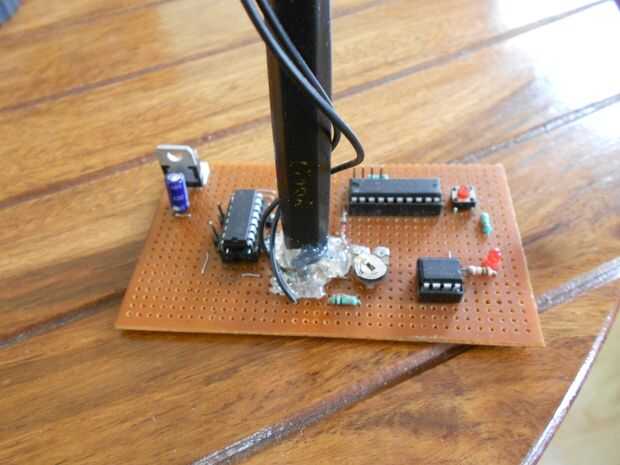
Batería : utiliza tres pilas de 4v/500mA, conectáramos en serie a 12v, es resistente y funciona muy bien.
Motores : usaba motores de 100 RPM, pero puede utilizar cualquier cosa entre 60-500 RPM.
Chasis : utiliza aglomerado, caliente de pegado para construir una caja abierta y fija los motores de los lados. He arreglado una rueda castor en el centro debajo de la caja como se muestra en la imagen.





")






 Básicos Arduino Robot buscador de luz!")