Paso 5: Estado 2: ejecutar la parte 1
La primera parte de este estado es un 2000ms demora. Esto fue utilizada para que el usuario tenía tiempo para quitar su mano de la palanca de mando antes de que el robot comenzaría a conducir.
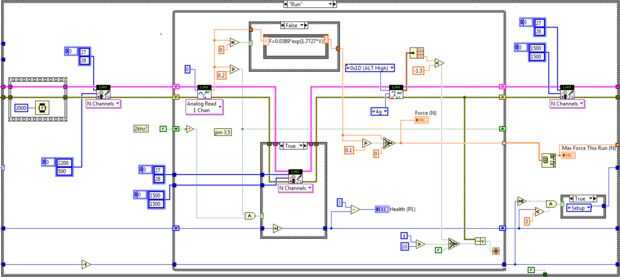
Después de esto, el bloque de canales servo escritura N se utiliza para establecer los servos adelante por suministrar un ancho de pulso 2200uS al izquierda pulso motor y 500uS para el motor adecuado. Las anchuras de pulso son diferentes porque uno de los servos es "al revés".
Desde aquí, un tiempo de bucle se utiliza para supervisar la fuerza de sentido y el valor de la aceleración. De la hoja de datos, se puede aproximar la fuerza desde el sensor de fuerza para fuerzas bajas utilizando la ecuación F = 0.0389*exp(1.7727*V) donde F es la fuerza medida y V es la lectura de tensión. Una estructura de caso fue utilizada para que cuando la tensión medida a través del sensor de fuerza es cero, la lectura de fuerza también muestra cero. Para asegurarse de que las fluctuaciones de tensión pequeños no están incluidas en la lectura de la fuerza, una función de selección se utiliza para que pequeñas tensiones resultan en una lectura de fuerza cero.
La siguiente idea era leer la fuerza medida por el sensor y la pantalla el valor máximo después del tiempo bucle fue por lo que permite la indexación en la medida de fuerza y luego con un mín/máx bloquear para leer el valor máximo de la matriz resultante.
")

 y LabVIEW")




")





