Paso 10: Configuración de los programas (Glovepie)
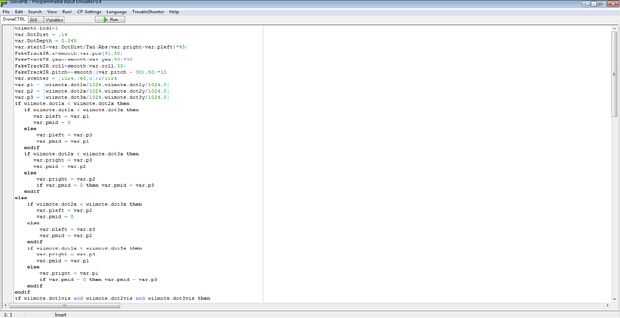
Abrir Glovepie y copiar el siguiente script en él, luego guardar como lo que quieras (minimizar cuando se hace):
Wiimote. Led1 = 1
var. DotDist =.14
var. DotDepth = 0.045
var.startZ=var. DotDist/Tan(Abs(var.pright-var.pleft)*45)
FakeTrackIR.z=smooth(var.pos[3],50)
FakeTrackIR.yaw=-liso (var.yaw,50) * 30
FakeTrackIR.roll=smooth(var.roll,50)
FakeTrackIR.pitch= suave ((var.pitch-30), 50) * 10
var.Scenter = [1024,768,0] 2/1024
var.P1 = [wiimote.dot1x/1024,wiimote.dot1y/1024,0]
var.P2 = [wiimote.dot2x/1024,wiimote.dot2y/1024,0]
var.P3 = [wiimote.dot3x/1024,wiimote.dot3y/1024,0]
Si wiimote.dot1x < wiimote.dot2x entonces
Si wiimote.dot1x < wiimote.dot3x entonces
var.pleft = var.p1
var.PMID = 0
otra cosa
var.pleft = var.p3
var.PMID = var.p1
endif
Si wiimote.dot2x < wiimote.dot3x entonces
var.pright = var.p3
var.PMID = var.p2
otra cosa
var.pright = var.p2
Si var.pmid = 0 then var.pmid = var.p3
endif
otra cosa
Si wiimote.dot2x < wiimote.dot3x entonces
var.pleft = var.p2
var.PMID = 0
otra cosa
var.pleft = var.p3
var.PMID = var.p2
endif
Si wiimote.dot1x < wiimote.dot3x entonces
var.pright = var.p3
var.PMID = var.p1
otra cosa
var.pright = var.p1
Si var.pmid = 0 then var.pmid = var.p3
endif
endif
Si wiimote.dot1vis y wiimote.dot2vis y wiimote.dot3vis luego
var.posZ = var. DotDist/Tan(Abs(var.pright-var.pleft)*45)
var.pmidoff = Abs((var.pright-var.pleft) Cruz (var.pmid-var.pleft))/Abs(var.pright-var.pleft) ^ 2
var.pmidcent = ((var.pright-var.pleft) punto (var.pmid-var.pleft))/Abs(var.pright-var.pleft) ^ 2
var.Turn = aTan ((0.5-var.pmidcent) / (var. DotDepth * Cos (var.pitch) / var. DotDist))
debug=var.Turn
Si (var.turn <-(2)) entonces
clave. D = true
terminar si
Si (var.turn > 5) entonces
clave. A = true
terminar si
Si (var.turn > -2) & & (var.turn < 5) entonces
clave. A = false
clave. D = false
terminar si
endif
Si dicho entonces ("escucha", 5)
var.Listen = true
decir ("reconocimiento de voz activado")
terminar si
Si dicho ("adiós", 5) o ("dejar de escuchar") entonces
var.Listen = false
decir ("reconocimiento de voz desactivado")
terminar si
Si var.listen = true
Si said("close") o said("exit")
prensa Keyboard.Alt
prensa Keyboard.F4
espera 100ms
lanzamiento Keyboard.F4
lanzamiento Keyboard.Alt
Say("closing")
terminar si
Si dicho ("forward", 5) o ("avanzar", 5) o ("a pie", 5) o ("mover", 5) luego
clave. W = true
clave. S = false
decir ("avanzando")
terminar si
Si dicho ("espalda", 5) o dicho ("al revés", 5) o dicho ("al revés", 5) o dijo ("volver", 5) o ("retroceder", 5) o ("retroceder", 5) entonces
clave. S = true
clave. W = false
decir ("retrocediendo")
terminar si
Si dicho entonces ("stop", 5)
clave. W = false
clave. S = false
Say("stopping")
terminar si
terminar si
CONTINUAR AL PASO SIGUIENTE








 - Makeblock, Arduino, Droidscript")


")

