Paso 2: Los componentes de la soldadura

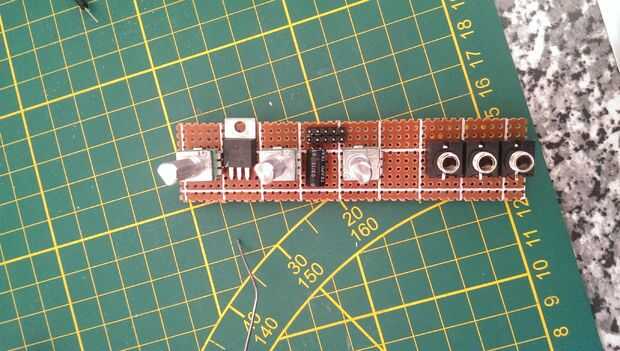


No necesita colocar los componentes como lo hice. Pero puede utilizar las imágenes para obtener una indicación de cómo colocar los componentes.
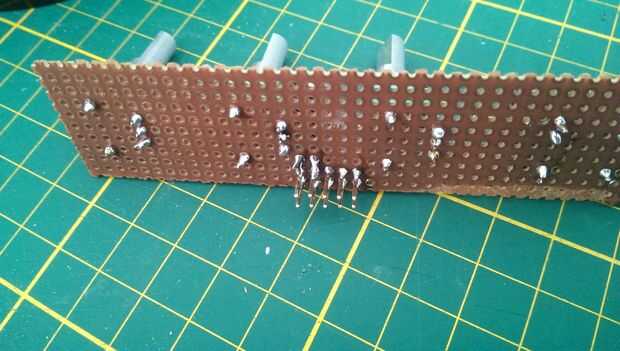
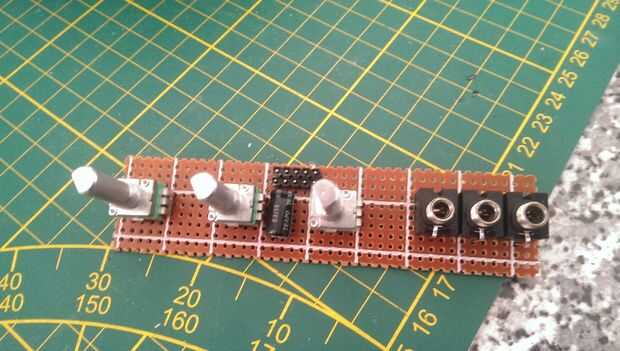
-Los potenciómetros y tomas de corriente de soldadura
-Tome las cabeceras masculinas (que deben ser 2 x 5) y colocarlos en algún lugar entre las macetas. Preferentemente los desplazamiento a izquierda o derecha (y apuntando hacia la parte posterior de la perfboard). Soldarlos...
Recuerde que el encabezado es el mismo que el cuadro dibujado arriba (para + 12V será el perno superior, luego GND 3 veces, luego - 12V). Para este instructivo vamos a utilizar uno + 12V y GND uno.
-Ahora soldar el casquillo electrolítico con el + (perno largo) a + 12V y - (perno corto o con indicador gris) a la tierra lo más cerca posible de la cabecera. Este casquillo estabilizará la venida actual de su autobús.
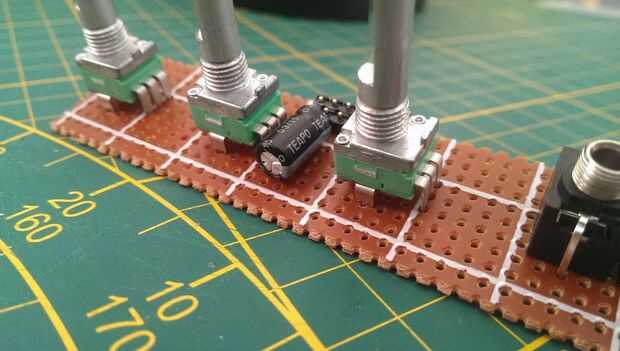
-El regulador de voltaje 5V de la soldadura donde hay espacio (ver imagen). Cuando te enfrentas al regulador de voltaje el pin izquierdo es la entrada (+ 12V), la media es GND y la derecha es la salida (+ 5V).
-Coloque las tapas de cerámica cerca del regulador de tensión (ver foto). Y les de la soldadura.
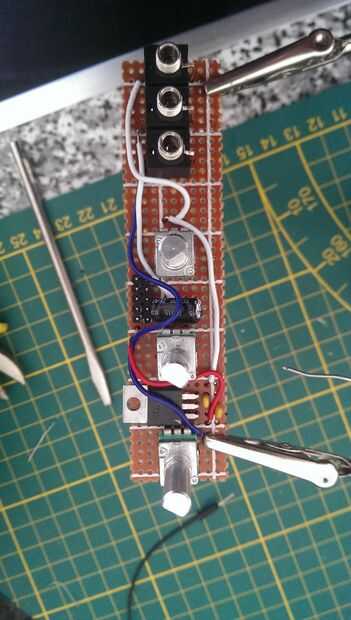
-Los pernos de las tapas de cerámica a los pines del regulador de voltaje de la soldadura. De cada tapa de cerámica debe ser una conexión a tierra. De una tapa de una conexión a la entrada del regulador de voltaje y del casquillo una conexión a la salida del regulador de tensión. (Ver el esquema, sólo asegúrese de que hacerlo correctamente!)
-Conectar todos los pines GND de los componentes. Recuerde que el pin del potenciómetro que se conecta a GND será el lado de 0V. Tan preferentemente izquierda pin frente a la parte delantera, eje derecho frente a la parte trasera. (Ver fotos).
-Ahora conectar todos los pines del mediados de los potenciómetros a sus tomas correspondientes. Usted puede poner una resistencia de 100R, esto no es necesario pero es recomendable.
-Ahora, conecte el pin + 12V de la cabecera de la clavija de entrada del regulador de voltaje.
- Y por último, conecte el pin de salida del regulador de voltaje a cada uno de los potenciómetros.
Cheque todo una vez más antes de conectarlo a su caso, asegúrese de que usted ha soldado todo correctamente. Conectar a su caso y comprobar si la salida de cada enchufe varía de 0V a 5V con un medidor de voltaje.
Eso es todo! Diviértete controlando cosas! Puede utilizar este módulo junto con un múltiple pasiva por ejemplo para dividir la señal a varios parámetros.
Compruebe hacia fuera nuestros módulos fabricados aquí: www.livestockelectronics.com
Y nuestros otros instructables aquí:








 con pfodApp")




