Paso 2: Agarre Robot
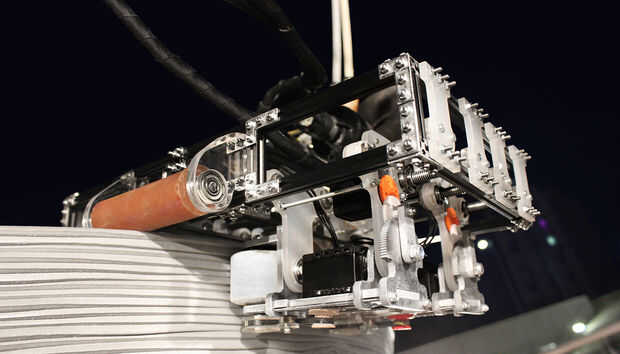
Para crear el shell principal de la estructura final, el segundo robot, el Robot agarre, se adhiere a la huella de la Fundación. Sus cuatro rodillos de la abrazadera en el borde superior de la estructura que le permite moverse a lo largo el material previamente impreso, depositando más capas. La boquilla mueve dinámicamente lo que permite una mayor precisión de la deposición de material. Para crear una superficie curva que del material de salida será compensado de manera incremental. Calentadores, integrados en la estructura del robot aumentan la temperatura del aire local para influir en el proceso de curado. Controlada por software a la medida el robot sigue una ruta predefinida, pero también puede ajustar su ruta para corregir los errores
en el proceso de impresión. Actuadores de giro controlan de altura por encima de la capa anterior para mantener una capa consistente.
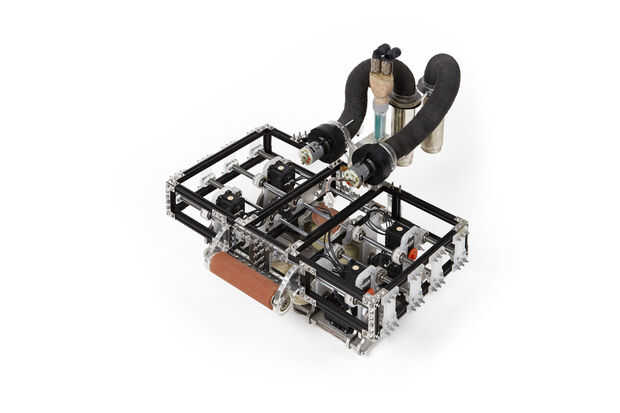
El tamaño de Grip Robot 40 * 27 * 12 cm, pesa 4,6 kg.
Herramientas y materiales:
-Makerbeam
-Dynamixel ax-12 servos * 9
-eje metálico 6mm
-Resortes
-movimiento lineal 6mm
-Chorro de agua aluminio para el cuerpo y engranajes
-Engranajes de plástico -18/6/6 m m del cojinete
-Núcleo de la rueda 3D impreso
-Goma para rodillos y ruedas de fundido
-Pistola despojó de elemento de calor, sensores y los aficionados.
-3D impreso la polea y la correa de tienda hobbycar
-4 m m de acrílico de corte por láser
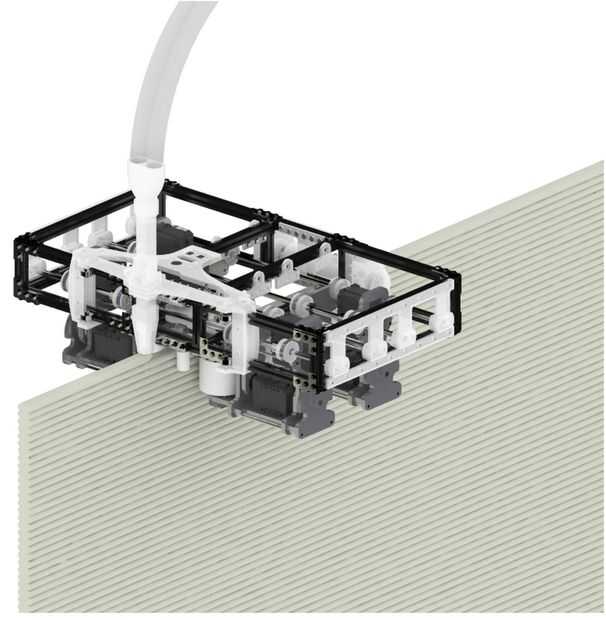
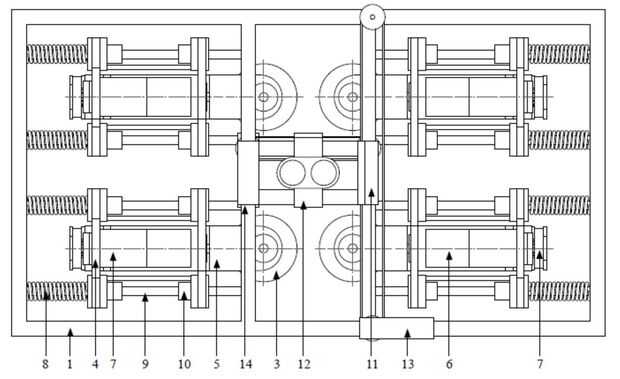
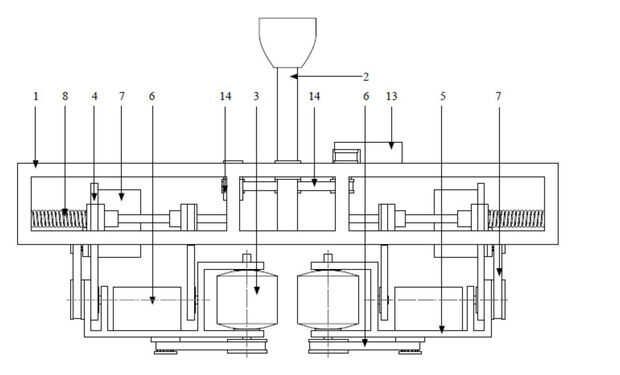
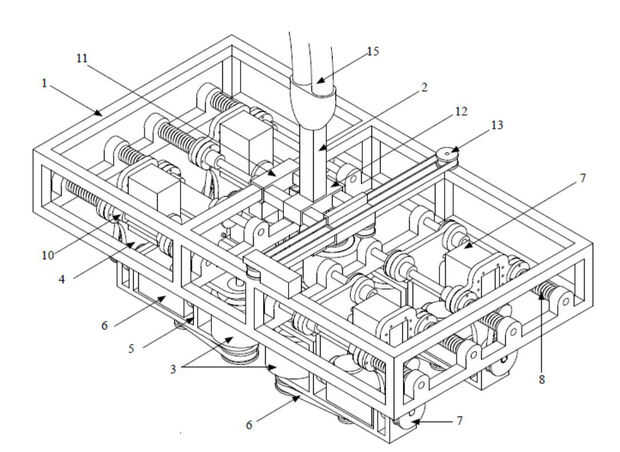
El sistema de posicionamiento del cabezal de impresión se compone de un sistema de movimiento lineal delantera-trasera (11),
sistema de movimiento lineal lateral (12), traseras, sistema de accionamiento de movimiento (13), sistema de accionamiento de movimiento lateral (14) y actuadores para el cabezal de impresión o múltiples cabezales de impresión. La conexión de los cabezales de impresión para el suministro de material se ilustra en (15). El dispositivo de sistema de posicionamiento consta de pies (5), que cada uno conectado a un más cuatro o más patas (4) que se unen a la estructura. Las piernas están conectadas a la estructura mediante un sistema de movimiento lineal (9). Cojinetes del movimiento linear (10) permiten un desplazamiento suave en relación con el marco. Este movimiento se puede accionar por resortes o por actuadores lineales (8). Pies se unen a las piernas a través de juntas rotativas que permiten una rotación con respecto a las piernas. Esta rotación puede ser controlada y se acciona mediante el sistema de accionamiento de pie (7). Las ruedas (3) están montadas en los pies y se mueven utilizando el sistema de accionamiento de la rueda (6). La superficie está cubierta con un material durable y flexible para reducir la vibración del dispositivo durante el movimiento y aumentar su agarre a la estructura en la que el dispositivo está conectado.
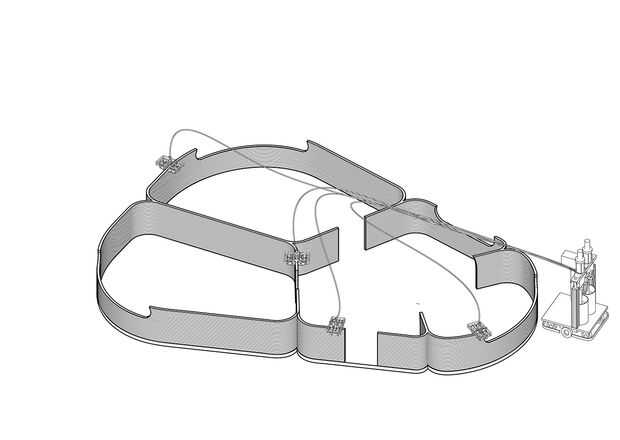
En el caso de que la ruta de impresión está cerrada sin aberturas, el movimiento del robot es continuo y no se pueden utilizar movimiento adelante-atrás cabezal de impresión. El dispositivo se coloca sobre la huella en una posición, una vez que el material se extruye a través de la abertura de la cabeza de impresión y el dispositivo se inicia en la dirección deseada, impresión sin pausa es utilizar una trayectoria en espiral continuo. En este caso las ruedas no están en su posición centralizada durante el proceso de impresión, el dispositivo está en constante movimiento hacia arriba; cada rotación completa del dispositivo se mueve hacia arriba por la altura de una capa.
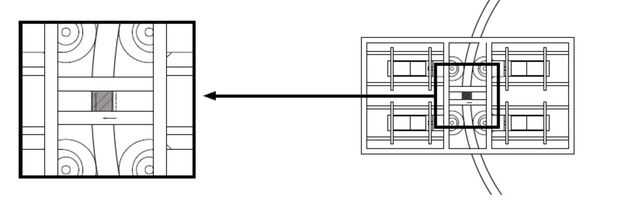
Tener el cabezal fijo en un de posición fija provocaría una serie de problemas, en cualquier trayectoria curva, el centro de la cabeza de impresión se apartaría del centro del camino, donde la posición del centro de la boquilla está marcada con una línea discontinua. En este caso cada paso anterior apartaría acumulativo de la forma deseada impresión así una estructura diferente de programar.
Esto puede ser resuelto mediante la introducción de movimiento lineal de un lado a otro a la cabeza de impresión, puede ser utilizado para corregir la desviación y control de la trayectoria de la cabeza de impresión. Posicionar el cabezal de impresión correctamente un sensor mecánico calcula la desviación y se ajusta en consecuencia. Si se conoce la posición de la curvatura del dispositivo y la ruta - desviación puede ser pre calculado geométricamente sin necesidad de sensores adicionales.
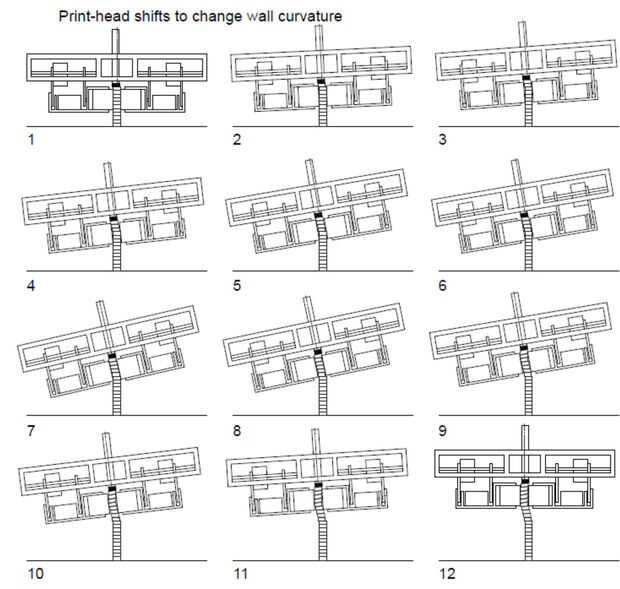
Si el cabezal de impresión se limitó a sólo después de la capa anterior, estructuras impresas sólo podrían ser formadas como sacadas versiones de sus huellas. Esto excluiría a formas como bóvedas y ménsulas. Cambiando el cabezal de impresión proporciona una oportunidad para modificar la curvatura de la pared durante el proceso de impresión. Cuando las capas relativas a sus anteriores capas la curvatura de los cambios de la pared. La cantidad de cambio debe ser calculado de antemano, variando depende de la posición del dispositivo. En caso de que la posición del robot es incorrecta o se detecta un error - desviación de la curva debe tenerse en cuenta y añadir o restar el cambio. La posición del robot en relación con el capas anteriores puede ser abstraída de varias maneras, por ejemplo diferentes tipos de sensores de sistemas de posicionamiento Local para contadores de giro en las ruedas que lleva a muchas posibilidades.













