Paso 3:


En primer lugar, conectar los servos a la ONU de arduino:
rojo = vcc, negro = gnd, blanco = 12 ó 13 para servo1 12 y para servo 2 13
Conecte el primer lado de la photoresistor1 al pin3, photoresistor2 a pin2, photoresistor3 al pin4.
Conecte el otro lado de la photoresistor1 a pin A1, photoresistor2 al pin A2, photoresistor3 al pin A0.
Conectar todas las partes segunda a 2,2 k resistencias y las resistencias a tierra.
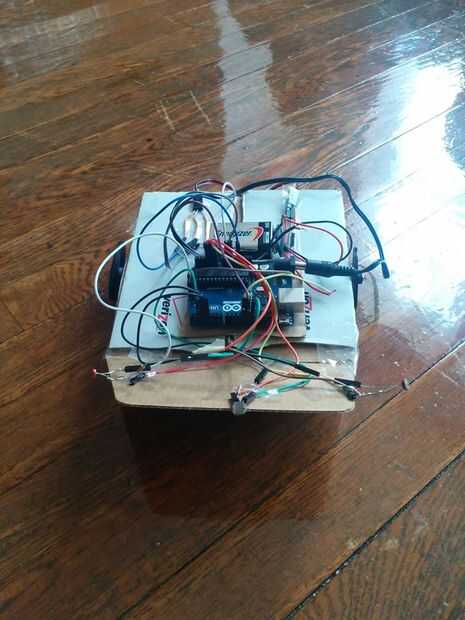
Para apoyar el robot, tenemos que poner algo debajo de él para que pueda mover sin problemas!
Puede utilizar cualquier cosa que puede soportar el robot, como una rueda, pero en este caso, he utilizado dos cápsulas.
Utilice una cinta de conducto para conectar los tapones de botellas.
Ahora colocarlos bajo el robot usando cinta de doble cara.
Utilice este código para iniciar tu propia luz robot siguiente:
#include;
Servo1 servo;
Servo servo2;
int sensor1 = 3;
input1 int = 1;
int sensor2 = 2;
int entrada2 = 2;
int sensor3 = 4;
input3 int = 0;
int s1ldrvalue = 0;
int s2ldrvalue = 0;
int s3ldrvalue = 0;
void setup)
{
pinMode(sensor1,OUTPUT);
digitalWrite(sensor1,HIGH);
pinMode(sensor2,OUTPUT);
digitalWrite(sensor2,HIGH);
pinMode(sensor3,OUTPUT);
digitalWrite(sensor3,HIGH);
servo1.Attach(12);
servo2.Attach(13);
}
void loop()
{
s1ldrvalue = analogRead(input1);
s2ldrvalue = analogRead(input2);
s3ldrvalue = analogRead(input3);
servo1.Write(90);
servo2.Write(90);
{
if(s1ldrvalue < 500)
{
servo1.Write(0);
servo2.Write(180);
Delay(500);
}
otra cosa
{
if(s2ldrvalue < 500)
{
servo1.Write(0);
servo2.Write(0);
Delay(500);
}
otra cosa
{
Si (s3ldrvalue < 500)
{
servo1.Write(180);
servo2.Write(180);
Delay(500);
}
otra cosa;
}}}}








")


")
")
