Paso 4: Comprender el marco de WebIOPi
La interfaz que se muestra en el navegador es autoría de HTML (Filename:index.html) y Javascript, mientras que el backend que impulsa los GPIOs está escrito en Python (nombre de archivo: script.py). Notas detalladas sobre la creación de una aplicación web personalizada basan en el WebIOPi marco se une como notas en el repositorio Bitbucket.
Macros personalizadas definidas en el script de Python se pueden accionar desde el archivo HTML.
Por ejemplo: webiopi().callMacro("go_forward"); Esto es una llamada personalizada a un go_forward de macros definidas en el script de Python que se encarga del proceso de drving ambos los motores en la dirección de avance.
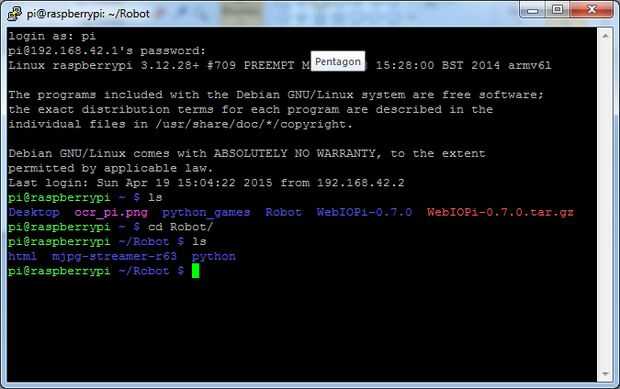
En la imagen adjuntada se muestra la jerarquía de directorio de donde los archivos se almacenan en el Pi.
La carpeta Robot contiene las subcarpetas:
- HTML: contiene index.html
- Python: que contiene script.py
- mjpg-streamer-r63: que contiene los archivos de compilación y archivo ejecutable para ejecutar la Webcam
MJPG-Streamer: La secuencia de vídeo en directo desde la Webcam de USB funciona en el puerto 8080 del Pi por defecto. Para ver manualmente la secuencia, vaya a RASPBERRYPI_IP:8080 en el explorador después de encender la cámara web.
LeapMotion código:
Fragmentos de código de los ejemplos proporcionados en el SDK de LeapMotion fueron incrustados en el archivo index.html. Archivo de leap.js de LeapMotion tiene que agregar en la carpeta html en el directorio del proyecto en la Raspberry Pi.
El parámetro de palmPosition enviado por la LeapMotion se utiliza para determinar qué macro para activar en la Raspberry Pi.
")








")



