Paso 13: Construcción de los cerebros
![]()
![]()
![]()
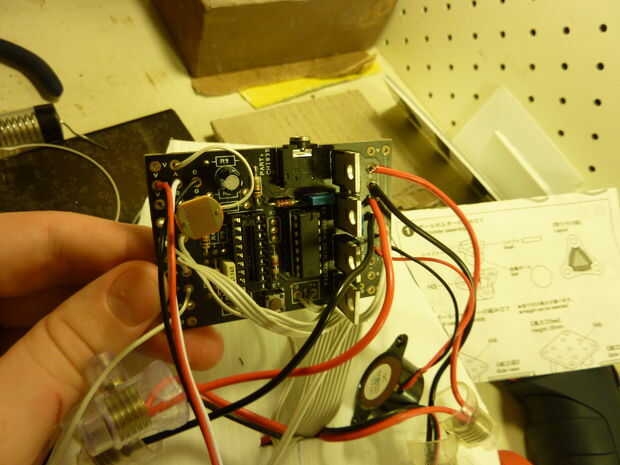
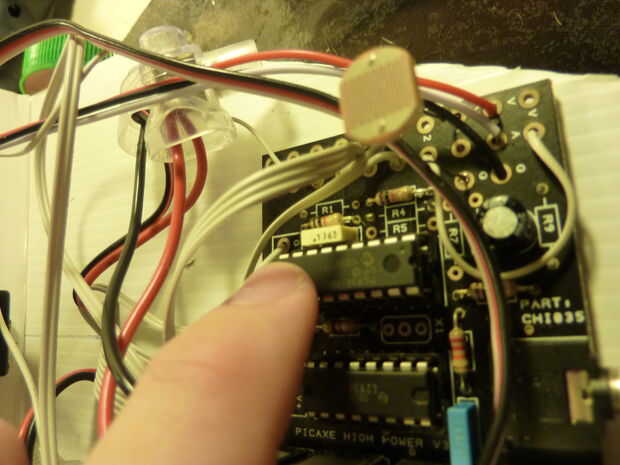
El siguiente paso es la parte emocionante, atrayendo todo a la Junta. En primer lugar la resistencia une la lógica y fuente de alimentación en el tablero, luego cortados resistor 4 y 1. Después de soldar los cables a la potencia del picaxe y los cables para la lógica de picaxe en el tablero. El siguiente es los motores soldarlos a de salida y salida B hará de todos modos como puede ser compensada con la programación. Después de los motores son una soldadura de los cables va al regulador para el servo. Coloque el resistor de 330 para el positivo (rojo) para el servo y el positivo del regulador servo a la resistencia de continuación conectar la tierra al servo. Soldar el pin de señal del servo al 7 puesto (en/hacia fuera). Conecte el zumbador a la salida 2 (+) a rojo and(-) al negro. Conecte el sensor infrarrojo sharp a la entrada analógica y el resistor dependiente de luz a la B de entrada. De entrada 2 Coloque un cable de puente desde el + punto a la entrada será por lo que el robot puede comprobar su nivel de energía, como el picaxe está conectada a las baterías mediante un regulador sólo debe leer 5Vs hasta llegar por debajo del nivel que el regulador puede manejar y se baje de 5Vs. En este punto los motores ya no será capaces de ejecutar pero el chip picaxe todavía intentará conseguir que gire. Luego conecte los cables de los LEDs al puerto número 3 en el lado de la entrada. Conecte el cable de mediano para los interruptores de golpe 4 puertos + terminal luego conectar el interruptor de tope derecha a la entrada del puerto número 4 y el interruptor izquierdo para el puerto número 6.
IMPORTANTE: Asegúrese de que no tiene cualesquiera de las virutas del IC insertadas al soldar ya pueden freírlos.
IMPORTANTE: Asegúrese de que antes de empezar a soldar las piezas en que la Junta llega al final del robot con el casquillo de descarga más cercano hasta el final.