Paso 8: Brushless DC Motor





Motores brushless DC (BLDC) son llamados por muchos nombres: imán permanente sin escobillas, motores de CA de imán permanente, motores síncronos de imán permanente etc.. La confusión surge porque un motor dc sin escobillas no funciona directamente de una fuente de voltaje dc. Sin embargo, como veremos, el principio básico de operación es similar a un motor de corriente continua.

Un BLDC tiene un rotor con imanes permanentes y un estator con bobinas. Es esencialmente un motor de c.c. el revés. Se han eliminado las escobillas y el conmutador y las bobinas están conectadas a la electrónica de control. La electrónica de control reemplazar la función del conmutador y energiza la bobina adecuada. Como se muestra en la animación, la bobina se energiza en un patrón que gira alrededor del estator. El estator energizado la bobina conduce el imán de rotor e interruptores así como el rotor se alinea con el estator. No hay ninguna chispa, que es una de las ventajas del motor BLDC.
Las escobillas de un motor dc tienen varias limitaciones; vida del cepillo, cepillo residuo, velocidad máxima y ruido eléctrico. Los motores BLDC son potencialmente limpiador, más rápido, más eficiente, menos ruidoso y más confiable. Sin embargo, el motor BLDC requiere control electrónico.
Entonces la construcción de un motor DC sin escobillas es muy similar al motor AC, convirtiéndolo en un verdadero motor sincrónico pero una desventaja es que es más caro que un equivalente "había cepillado" diseño del motor.
Inrunners vs avanzados
Hay dos tipos de motores sin cepillo de RC, inrunners y avanzados.
Los imanes permanentes de motores sin escobillas inrunner se colocan en el interior de los electroimanes. Un motor sin cepillo del outrunner tiene los imanes permanentes en el exterior de los electroimanes.
Cuanto más rápido gira un motor, más eficiente es. Motores inrunner girar muy rápidamente y son mucho más eficientes que motores outrunner. Motores RC Brushless inrunner requieren una velocidad de reducción de engranajes entre el motor y la hélice de su avión de RC.
La desventaja de un inrunner es las partes agregadas que pueden y fallan. Haz despojados los engranajes y los ejes de la caja de engranajes se doblan fácilmente. También puede ser un obstáculo cuando la combinación de motor de caja de cambios para su aeroplano del RC de montaje cuidadosamente, especialmente bajo una cubierta.
Teoría de operación

Control
El control de los motores DC sin escobillas es muy diferente al normal cepillado motor de la C.C., en que este tipo de motor incorpora algunos medios para detectar la posición angular de los rotores (o polos magnéticos) necesaria para producir las señales de retroalimentación necesarias para el control de lo dispositivos de la conmutación del semiconductor. El sensor de posición/poste más común es el "Sensor de efecto Hall", pero algunos motores también utilizan sensores ópticos. Mediante sensores de efecto Hall, la polaridad de los electroimanes se conecta por la circuitería de la unidad de control del motor. Entonces el motor se puede sincronizar fácilmente a una señal de reloj digital, proporcionando un control preciso de la velocidad. Motores sin cepillo de la C.C. pueden construirse para tener, un rotor de imán permanente externo y un estator electroimán interno o un rotor de imán permanente interno y un estator electroimán externo.
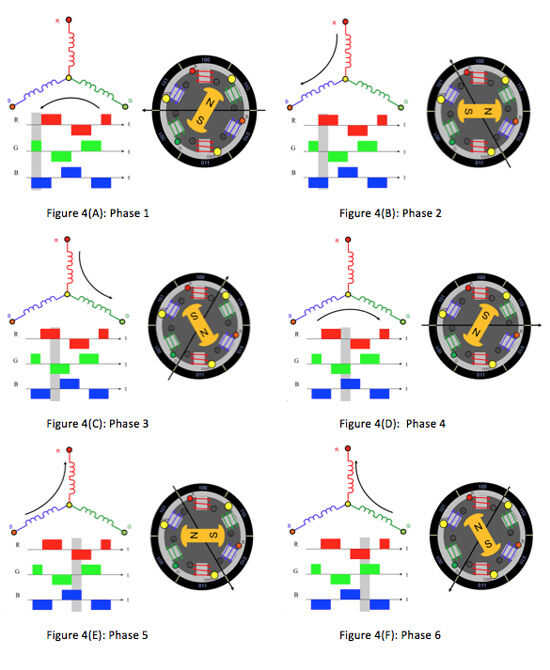
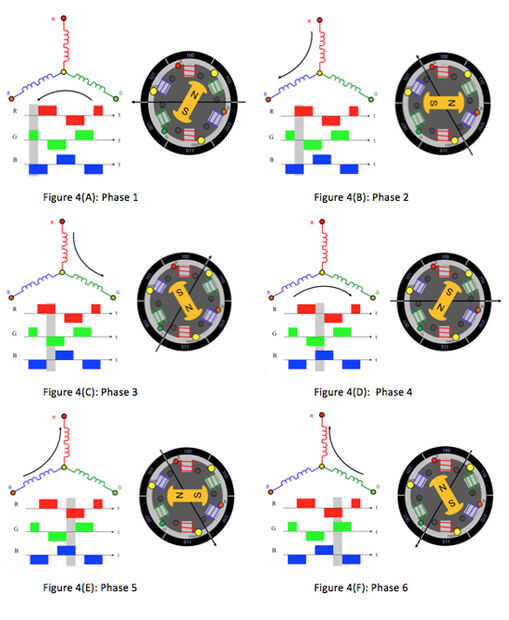
En la figura 4 (A), el verde etiquetados "001" la bobina se energiza como la bobina azul como "010" está energizado como el polo sur y Polo Norte. Debido a esta excitación, el polo sur del rotor se alinea con el verde de la bobina y el polo norte se alinea con el rojo rotulado "100" de la bobina. Para mover el rotor, se energizan los bobinados "Rojo" y "Azul" en la dirección que se muestra en la figura 4. Esto hace que el rojo de la bobina para convertirse en el Polo Norte y el azul de la bobina para convertirse en el Polo Sur. Este desplazamiento del campo magnético en el estator produce torsión debido al desarrollo de repulsión (cuerda roja – alineación Norte-Norte) y las fuerzas de atracción (azul de cuerda – alineación norte-sur), que mueve el rotor en la dirección a la derecha.
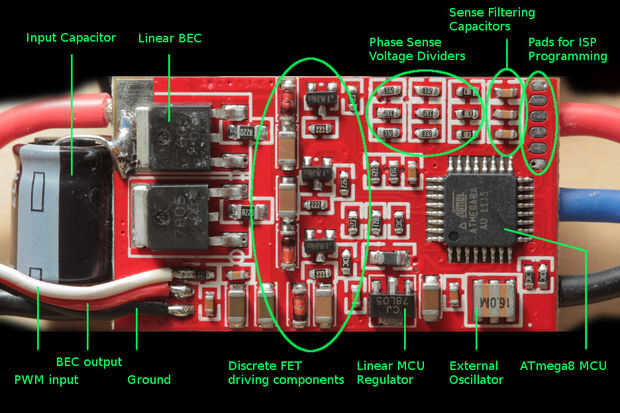
Control de velocidad
Motor dc sin escobillas son realmente motores trifasicos ac. Control de velocidad electrónico de la velocidad se utiliza control o ESC. Sistemas ESC sin escobillas básicamente crean trifásica AC potencia de tensión limitada de un a bordo DC de corriente, para ejecutar los motores sin escobillas enviando una secuencia de señales de CA generados a partir de circuitos de salida, empleando una muy baja impedancia para la rotación. Motores sin escobillas, de otra manera llamados avanzados o inrunners dependiendo de su configuración física, se han convertido en muy popular entre los aficionados de aeromodelismo de radio control "electroflight" debido a su eficacia, poder, longevidad y peso ligero en comparación con los motores tradicionales de cepillado. Sin embargo, controladores de motores de AC sin escobillas son mucho más complicados de controladores de motor cepillados.
La fase correcta varía según la rotación del motor, que debe ser tomado en cuenta por la ESC: generalmente, la back EMF del motor se utiliza para detectar esta rotación, pero existen variaciones que utilizan magnéticos (efecto Hall) o detectores ópticos. Controles de velocidad programables por computadora generalmente tienen especificadas por el usuario opciones que permiten establecer límites de corte de baja tensión, tiempo, aceleración, frenado y dirección de la rotación. Invertir la dirección del motor también puede ser logrado cambiando dos de los tres conductores de salida al motor.
Corriente nominal de salida
Una ESC tendrá un límite de potencia. Para manejar más energía, la ESC tiene que ser más grande, más pesado y es más caro. Es importante saber la corriente máxima que el motor va a tirar a toda velocidad. Esto determina la intensidad que le busque en una ESC. Elige siempre una salida con una corriente nominal superior a lo que usted necesita. Si el motor se va a tirar 12A, un ESC 25A-clasificada es una opción mucho mejor que un nominal de 10A. La 10A ESC probablemente sobrecalentamiento y cocinar, incluso si sólo vuelas en el bloqueo de medio gas. CES son relativamente ligeras y mantienen el valor de reventa grandes, por lo que se trata de un elemento en su sistema de poder donde no vale la pena escatimar. Elegir el tipo correcto y la identificación de la corriente nominal mínima son los dos grandes pasos. Las siguiente opciones dependen de sus preferencias.
Tensión nominal
CES todos tienen límites de tensión. Algunas tienen incluso más de uno! ¿Cuál es su voltaje de la batería? Elegir una salida que está diseñado para funcionar con un voltaje igual o superior. Algunos CES están diseñados para voltajes bajos (por debajo de 13V), para media tensión (inferior a 25V) y para tensiones altas (superiores a 25V). No conecte una batería de alto voltaje a una tensión baja ESC, pero también es un desperdicio usar una salida de alto voltaje con una batería de bajo voltaje.
Ventajas
Ventajas del Motor sin cepillo de DC en comparación con su primo "cepillado" no es una mayor eficiencia, alta confiabilidad, bajo ruido eléctrico, control de velocidad y lo más importante, los cepillos o conmutador para usar hacia fuera produciendo una velocidad mucho mayor. Sin embargo su desventaja es que son más caros y más complicados de controlar.
Control de Arduino
Motores sin cepillo diseñados para vehículos y aeronaves de control remoto autónomo por lo general requieren un controlador separado. Estos suelen ser del tipo sensorless y servo estándar de uso tipo señales de pulsos para control de velocidad.
Control de motor de BLDC es muy fácil. La mayoría de los CES necesita una frecuencia de 50Hz, es decir, un ciclo de 20 ms y la velocidad depende del ciclo de deber ofrecerle. 1ms reduzcan su velocidad al mínimo o incluso detenerlo (depende del modelo ESC) mientras que un 2ms pulso funcionará el motor a su velocidad máxima. Los valores entre ellos proporcionan una variación de velocidad.
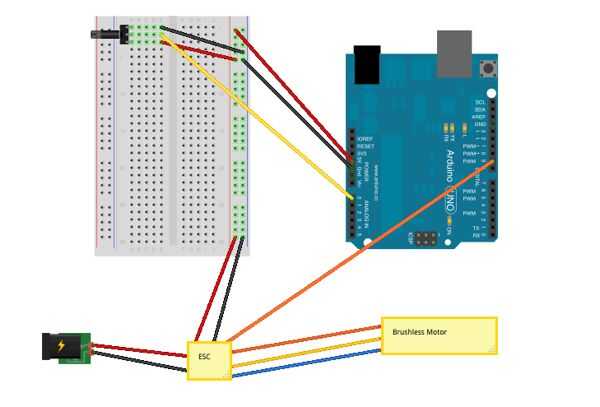
Por lo general CES necesitan un voltaje superior al proporcionado por el Arduino de su pin de 5V: normalmente necesitan 2 células de LiPo (alrededor de 8V). Para lograr que todo el circuito debe estar alimentado desde una fuente externa conectada directamente a la ESC y no a través de Arduino, que se alimenta por el circuito BEC de la ESC. Para hacer que eso suceda es suficiente para conectar el rojo y negro del conector control de 5V y GDN de la placa Arduino.
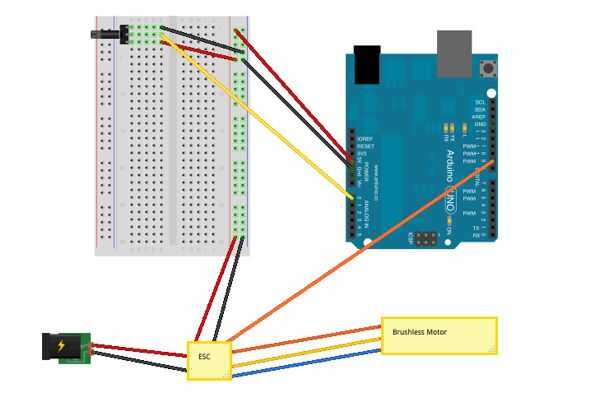
El resto del circuito es bastante fácil: del pin 9 del Arduino tenemos la señal de salida, y en el pin 0, la tensión medida desde el potenciómetro viene en.
A veces ESC necesita calibración y en términos de CES, calibración significa establecer las velocidades max y min de
el motor en relación con el ancho máximo y mínimo de la señal PWM enviada por Arduino. La señal PWM por la ESC es el mismo tipo como una señal del servo, lo que significa que la biblioteca Servo de Adruino puede utilizarse para calibrar y controlar el ESCs. La ESC ajusta la velocidad del motor según la relación de alta a las señales de baja. Consiste en programar el ESC para entender las ondas PWM correspondiente a la parada y velocidades máximas del motor.
El rango de señal para la mayoría de los motores servos y ESCs es una amplitud de la señal alta entre 1000 y 2000 microsegundos en un período de repetición de 20 milisegundos (asumiendo que una señal PWM de 50hz). Para el quad copter, sin embargo, queremos que los van a ser tan amplia como sea posible permitir un mayor control incremental del motor. Con este fin, hemos calibrado los CES para leer una amplitud de la señal de 700 a 2000 microsegundos con 700 siendo la velocidad de la parada y 2000 la velocidad máxima. Algunos ESC no pudo leer una señal inferior a 700 microsegundos.
Los CES de calibración es bastante simple. Para entrar en modo de programación, la señal de servo máxima (2000 microsegundos) es enviada a la ESC, la ESC se enciende y espera dos segundos, luego se envía la señal de servo mínimo (700 microsegundos). Una vez que el CES emite una serie de pitidos de confirmación (señales de onda especial enviadas al motor para emitir sonidos pitidos), el ESC está calibrado (consulte la hoja de datos específico de ESC para más detalles).
Solo toma la lectura de la "mariposa", mapas de 0-1023 a 0-179 (análogo a "grados" de servo) y luego la envía a la ESC a través de la biblioteca de Servo. Incluso en su extrema sencillez este bosquejo muy útil cuando desea calibrar un nuevo ESC para trabajar con la librería Servo de Arduino.
Aplicaciones:
- Multicopters
- Abejones
- Vehículos de Radio Control
- Unidades de disco
- Fanáticos
- Servos industriales
- Vehículos híbridos
- Motorreductores de alta gama
Ventajas:
- Tranquilo
- Eficiente
Limitaciones: Algunos tipos de motores sin escobillas necesitan un controlador independiente para la operación.
Para motor de CC sin escobillas, visite https://www.sparkfun.com/categories/245













