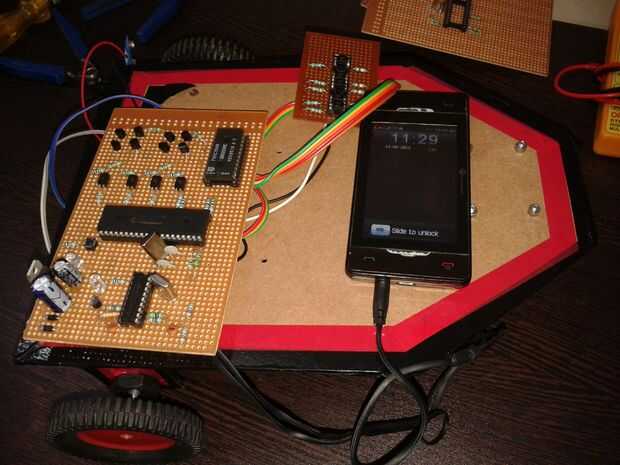

Robots controlados convencionalmente inalámbrico uso circuitos de Rf, que rango de frecuencia tienen trabajo gama, limitada y limitada de Control. Uso de un teléfono móvil para el Control robótico puede superar estas limitaciones. Ofrece la ventaja de Control robusto, gama de trabajo tan grande como el área del proveedor del servicio, sin interferencias con otros controladores. Aunque el aspecto y las capacidades del Robot varían enormemente, todos los Robots comparten la característica de una estructura mecánica, movible, bajo alguna forma de Control. El Control del Robot consiste en tres fases: percepción, procesamiento y acción. Generalmente, los preceptores están montados los sensores en el Robot, procesamiento es realizado por el procesador o microcontrolador incorporado, y la tarea es realizada usando motores o con algunos otros actuadores. En este proyecto el Robot está conectado a GSM móvil (tecnología de DTMF) que es controlado por el teléfono móvil de usuario. Con la ayuda de comandos podemos mover nuestro Robot en la dirección deseada según nuestras necesidades. Este proyecto está avanzado versión de mi último proyecto, es decir, Wireless Radio frecuencia módulo usando PIC microcontrolador.



![Cómo hacer un vehículo de tres ruedas [chasis robot]](https://foto.askix.com/thumb/170x110/3/4c/34ccca77f5a793857499558645805d4d.jpg "Cómo hacer un vehículo de tres ruedas [chasis robot]")









