Paso 3: Habilidad nivel: básico. (1)

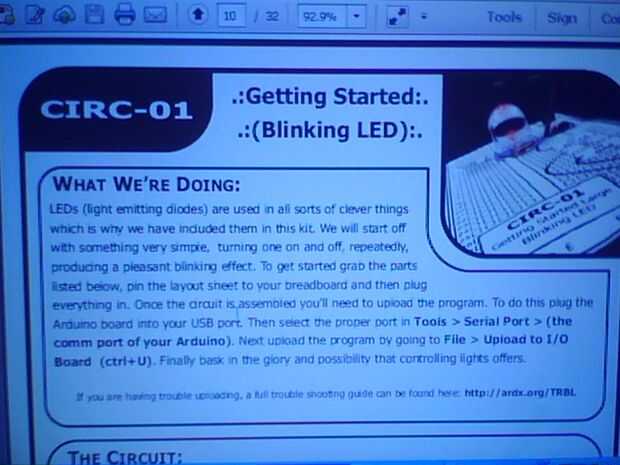

- Huesos desnudos y proyectos a partir de básicos (Blink & Fade LED luces y codificación Basics) con regulador Arduino Micro de cubiertas en varios pasos.
- Parpadeando y luego desvaneciéndose A luz con retrasos de tiempo de un Pin "Digital", entonces usando un Pin de "Análogo" a la entrada de tensión de Control (capacidad de usar código básico Setup, retraso de activación temporizado y Control de la tensión en forma analógica)
- En primer lugar descargar el Arduino IDE (Integrated Development Environment) utilizado en su PC y descargado, con el fin de comunicarse con el uso de tablero de Arduino el siguiente enlace... http://Arduino.CC/en/Main/software descargar 1.0.5 o la última versión del IDE (no necesita instalar)
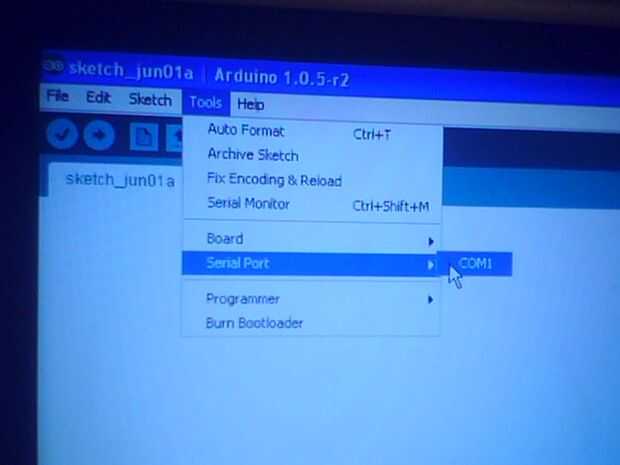
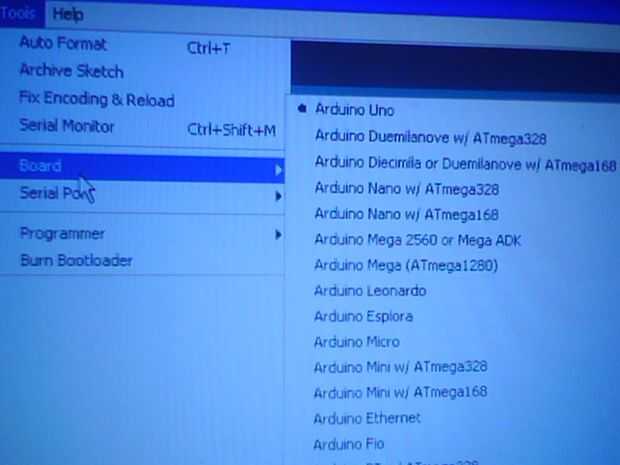
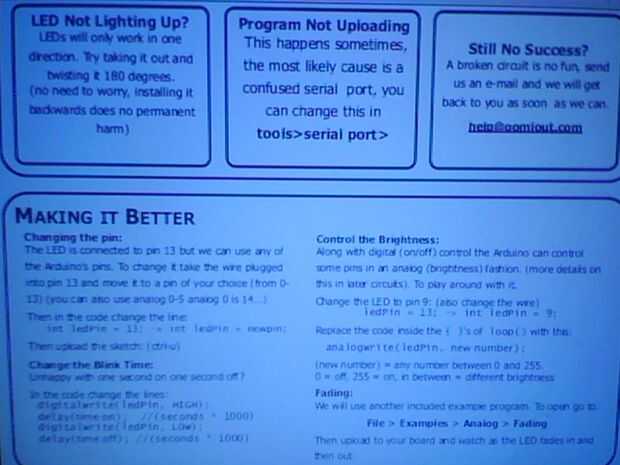
- Conectar tu Arduino a tu PC mediante su cable USB y abrir la ubicación de IDE generalmente en algún lugar en la unidad C: de tu PC hard drive (a menos que usted lo puso en otra parte) ahora mira la sección de herramientas y localizar donde se encuentran los puertos "COM" quitar Cable USB tu Arduino y ver qué puerto COM desaparecido que ahora es su Arduino, vuelva a conectarlo y el puerto com, continuación elige tu placa Arduino desde la Junta lista intentar no olvidar esta parte cuando se cambia a mega, micro, nano o cualquier otra variante de la Junta... A continuación, haga clic en archivo "Ejemplos" básicos y luego parpadear, observar la estructura de codificación, que configuraciones de pin con int, nula disposición, bucle vacío, son partes principales de la codificación (codificación después de esta línea ___)
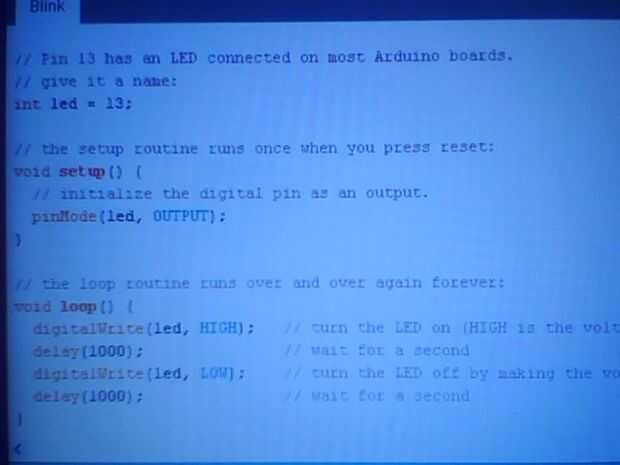
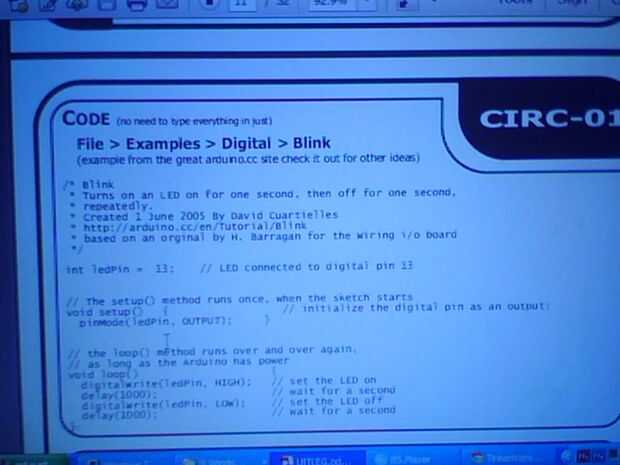
- / * Parpadear se enciende un LED encendido durante un segundo, luego apagado durante un segundo, repetidamente. Este ejemplo de código es de dominio público. * / / / Pin 13 tiene un LED conectado en la mayoría de placas Arduino. darle un nombre: int led = 13;
la rutina de instalación se ejecuta una vez al presionar reset: void setup() {/ / inicializar el pin digital como una salida. pinMode (led, salida);}
la rutina de loop se ejecuta una y otra vez para siempre: void loop() {digitalWrite (led, HIGH); / / enciende el LED (alto es el nivel de voltaje) delay(1000); / / espere un segundo digitalWrite (led, LOW); / / apagar el LED haciendo el delay(1000) de baja tensión; / / espere un segundo}
(Copiar y pegar el código anterior en la parte 5 en el IDE o use el bosquejo de ejemplo ya allí) Ver la estructura de codificación primaria y piezas y llegar a conocerlos bien para futuros proyectos consultar lo básico ahora y luego volver a aprender la codificación olvidados o los valores, la demora es parte de la codificación en 1000 milisegundos es 1 segundo 5000 siendo 5seconds etcétera, Digital Pin 13 de arduino tiene un LED limitar la resistencia, si utilizas otro pin no olvide añadir una resistencia de 560 ohm para evitar que se queme en un soplo del humo, función de escribir Digital que sea alta en/o bajo/apagado en el LED con retrasa en ambos extremos de 1 segundo en 1 segundo apagado en el bosquejo básico.
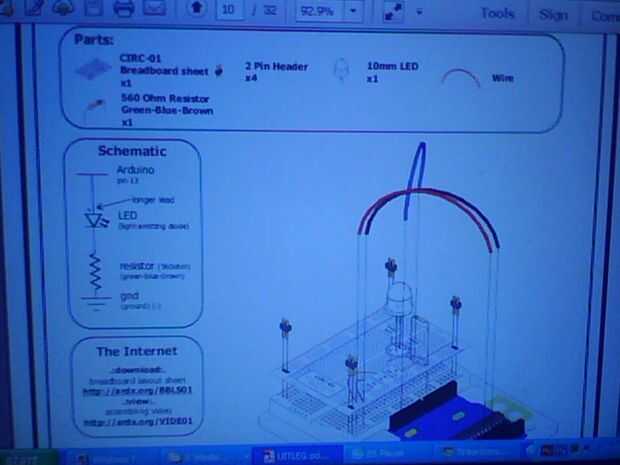
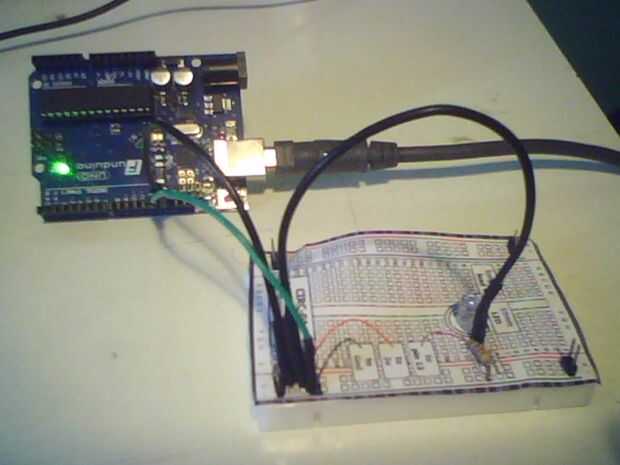
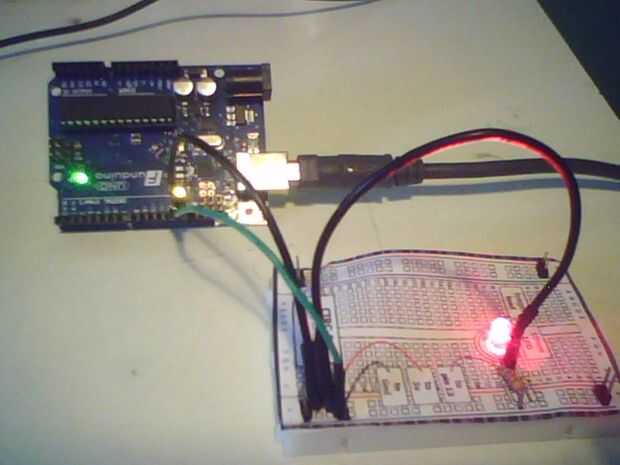
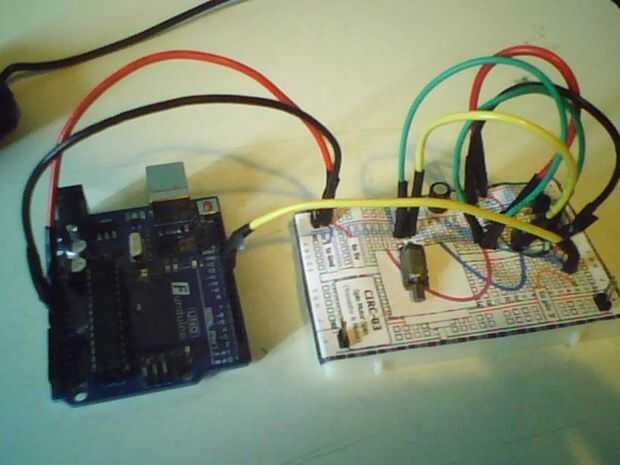
Establecer el circuito conectando un LED + Pin positivo al pin digital 13 y su - Pin negativo a grn (tierra) para completar el circuito a la luz del LED, utilizando ARDX plantillas y una placa sin soldadura con cables de puente altamente recomendado. (Ver Videos y ver fotos para la configuración del circuito y pruebas)
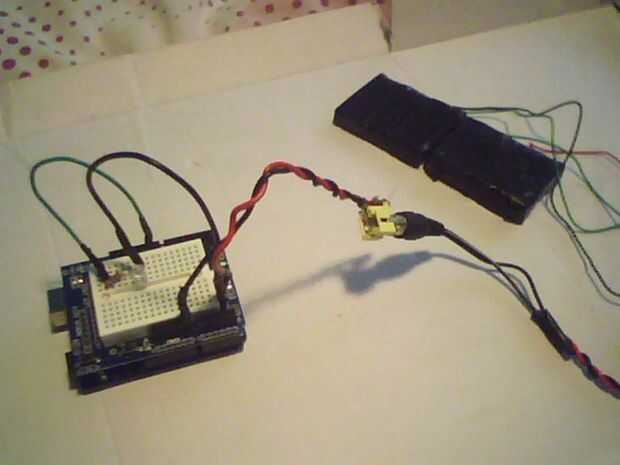
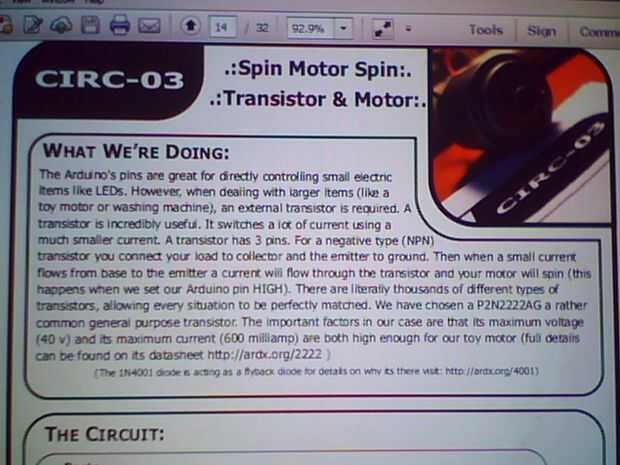
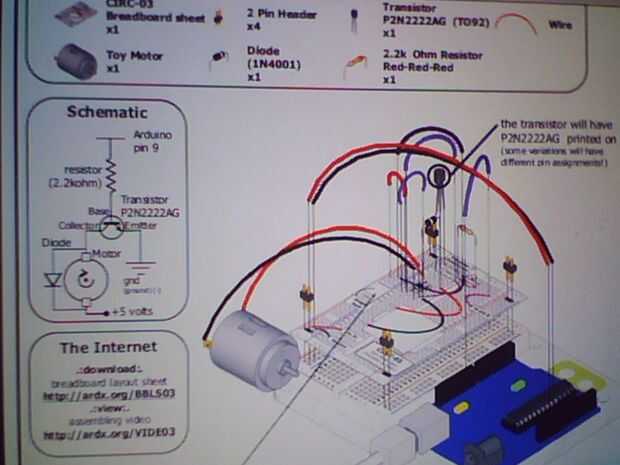
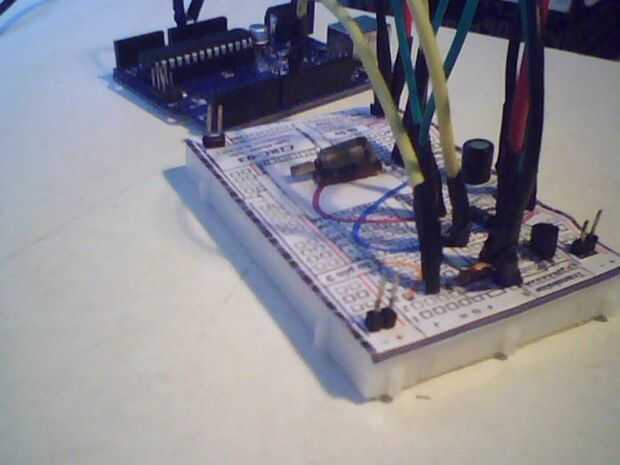
Girar la bosquejo de SPIN MOTOR (cubierto en varios pasos), Utilizando una plantilla ARDX para diseño de circuito más fácil cuando conectado a una placa sin soldadura, piezas necesarias son, un montón de jumper cables de varios colores, tipo de Transistor: (P2N2222A) o una variación de este común tipo de transistor, resistencia de 2.2 k estar ligada al pin del transistor base/medio, bloqueando el parada de retroalimentación del diodo, por lo que la corriente no fluya hacia el microcontrolador y la freímos , o el capacitor de 220uf itself,(Optional) motor pues si el motor no gira y tiene el poder de suavizar en el camino hacia el motor.
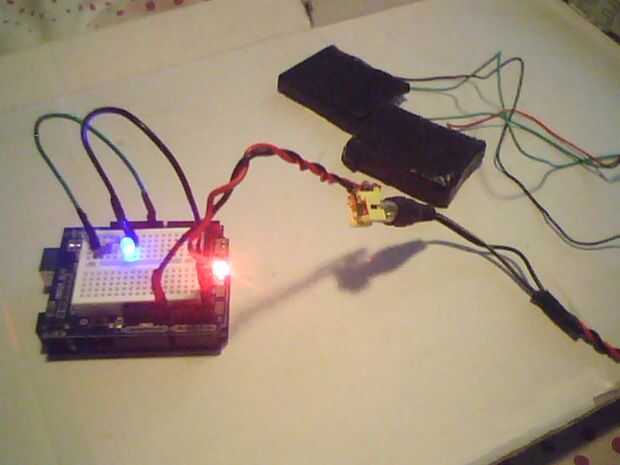
Una vez hecho su codificación básica en el último proyecto que esto le parecerá mucho más fácil y más mecánicos girando un motor tiene muchas aplicaciones de juguetes del animal doméstico para las ruedas del robot, igual que la última vez que una vez que el circuito ha sido establecido, ver fotos y videos, cargar el código en el código de medio ambiente del IDE después de esta línea ___
motorPin int = 9; definir el pin a que el motor está conectado
(si usas pin 9,10,11 o 3you puede controlar también la velocidad)
/ * * setup() - esta función se ejecuta una vez que cuando usted encienda su Arduino * ponemos el pin de motores que una salida (convertir el pin alto (+ 5v) o bajo (masa) (-)) * en lugar de una entrada (comprobando si un pin es alta o baja) * / void setup() {pinMode (motorPin, salida);}
/ * * loop() - esta función comenzará después de que termine la instalación y repita * llamamos a una función llamada motorOnThenOff() * /
void loop() / / ejecuta una y otra vez {motorOnThenOff(); / / motorOnThenOffWithSpeed(); / / motorAcceleration();}
/ * * motorOnThenOff() - vueltas motor encendido entonces apagado * (este código es idéntico al código que usamos para * el LED que parpadea) * / void motorOnThenOff() {int onTime = 2500; //the número de milisegundos para el motor se encienda para int offTime = 1000; //the número de milisegundos para el motor se apague por digitalWrite (motorPin, HIGH); / / enciende el motor en delay(onTime); / / espera milisegundos de onTime digitalWrite (motorPin BAJA); enciende el motor de delay(offTime); espera los milisegundos offTime}
/ * * motorOnThenOffWithSpeed() - vueltas motor encendido entonces apagado pero utiliza valores de velocidad, así * (este código es idéntico al código que usamos para * el LED que parpadea) * / void motorOnThenOffWithSpeed() {int onSpeed = 200; / / un número entre 0 (parado) y 255 (máxima velocidad) int onTime = 2500; //the número de milisegundos para el motor se encienda por offSpeed int = 50; / / un número entre 0 (parado) y 255 (máxima velocidad) int offTime = 1000; //the número de milisegundos para el motor se apague por analogWrite (motorPin, onSpeed); enciende el motor en delay(onTime); espera milisegundos de onTime analogWrite (motorPin, offSpeed); enciende el motor de delay(offTime); espera los milisegundos offTime}
/ * * motorAcceleration() - acelera el motor a toda velocidad luego * a cero * / void motorAcceleration() {int delayTime = 50; //milliseconds entre cada velocidad paso a //Accelerates el motor para (int me = 0; me < 256; i ++) {//goes a través de cada velocidad de 0 a 255 analogWrite(motorPin, i); //sets la nueva delay(delayTime) de velocidad; / / espera delayTime milisegundos} //Decelerates el motor para (int me = 255; me > = 0; i--) {//goes a través de cada velocidad de 255 a 0 analogWrite (motorPin , i); establece la nueva delay(delayTime) de velocidad; espera delayTime milisegundos}}
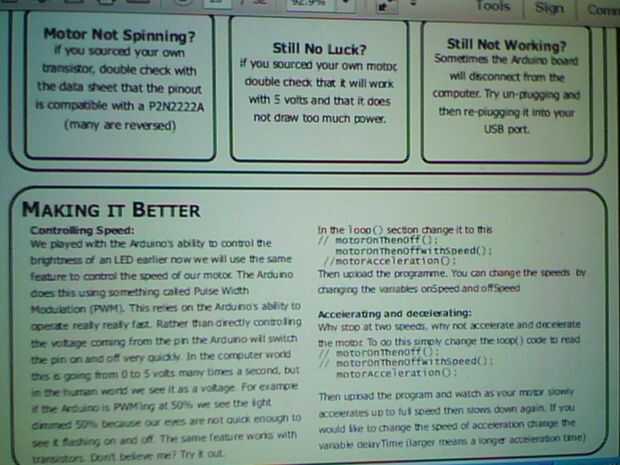
El código anterior le permitirá controlar el el motor está encendido y apagado con retardo similar al dibujo de blink pero con un motor, de hecho, puede utilizar la misma codificación como el bosquejo de blink para hacerla girar con retraso, sólo cambiar el nombre de LED también perno de Motor para que sea más fácil de entender, guarde el dibujo como spin motor spin etc. , sugiere mejoras incluyen control de la velocidad del motor con un Pin "Analógico" igual que el desvanecimiento del LED del bosquejo y "Optimización" de la codificación para que sea más pequeño, con nuevas funciones tales como i ++ para aumentar la velocidad de 0 a 256 analógica escribe salida de 5 voltios de valor más alto, la función de "i-" hace los incrementos frente abajo de 256 a 0 para ralentizar la velocidad del motor... (usando este método de código sólo es recomendable en programas de codificación grandes muy grande, tales como sistemas de robótica, motor/servos/IR/Data logger codificación dejaría poco espacio si en tableros más pequeños con menos memoria.
Utilizando piezas de encargo puede ser mucho más divertido, especialmente si utiliza un motor de vibración de alta potencia, usando muchas diversas clases de motores para ver que funciona mejor con este circuito también recomendable, pequeño juguete motores mejores obras.
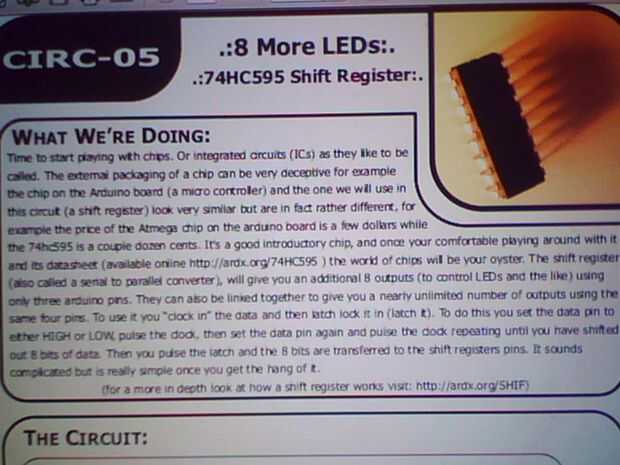
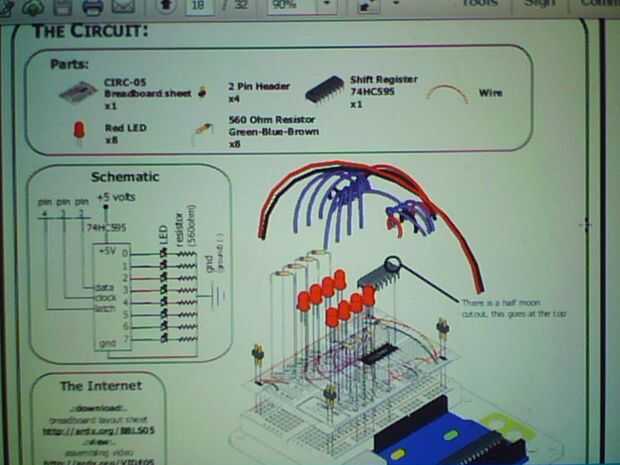
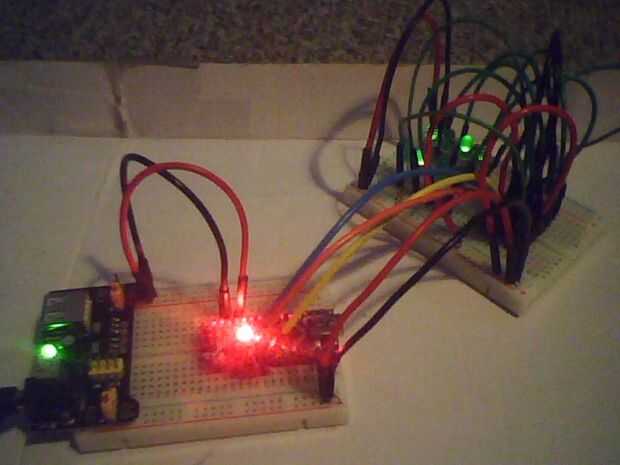
Registro de desplazamiento de 8 bits (IC) (control de x8 LED con x3 los pernos y animaciones LED) En varios pasos... ahora algo más interesante el uso de la tecnología de circuito integrado IC, (74HC595 Shift Register) lo siguiente, uso x3 pines de Arduino para cambiar de puesto hacia fuera de 8-bits de datos, lo que permite animaciones de LED... para una explicación de cómo esto se hace con pernos de reloj de datos de cierre de la viruta del IC por favor busque los microchips hoja de datos en línea ( http://www.nxp.com/documents/data_sheet/74HC_HCT59... ) pegar ese enlace en una barra de búsqueda vacío en gafas para el datasheet de este componente, llegar a conocer y su funcionamiento, y entenderás pines del IC en ninguna hora en todos.
Mismo sistema como siempre el circuito según las fotos y el video muestra, también puede encontrar documentación en línea sobre cómo hacer esto en más detalle si es necesario (Compruebe y vuelva a verificar el cableado aquí) será más los cables han utilizado todavía y es fácil de miss-aline los cables o no empujar un puente de alambre todo el camino , siempre haciendo cortocircuitos peligrosos si en el área de suministro de energía, verifique el cableado al hacer configuraciones complejas como ésta, o enlazan a virutas del IC, ya que requieren un montón de cables, cargar el código debajo de esta línea a tu IDE salvo que bajo cualquier nombre que desee en ___ de sketch
Definiciones de pines
Perno definiciones //The 74HC595 utiliza una comunicación serie //link que tiene tres pines int datos = 2; int reloj = 3; cierre de int = 4;
Utilizado para el solo LED manipulación int ledState = 0; const int a = alta; const int OFF = bajo;
/ * * setup() - esta función se ejecuta una vez que cuando usted encienda su Arduino * configuramos los pines de control de tres salidas * / void setup() {pinMode (datos, salida); pinMode (reloj, salida); pinMode (traba, salida);}
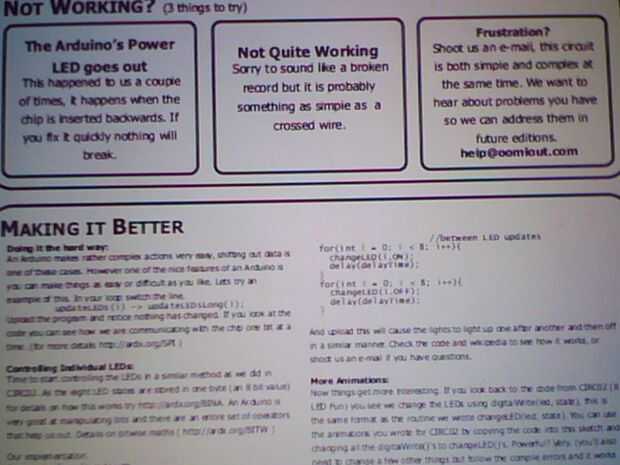
/ * * loop() - esta función comenzará después de que termine la instalación y repita * establecemos que LEDs nos desea en luego llamar a una rutina que envía a los Estados a los 74HC595 * / void loop() / / ejecutar una y otra vez {int delayTime = 100; //the número de milisegundos que retrasar entre versiones de LED de (int i = 0; i < 256; i ++) {updateLEDs(i); delay(delayTime);}}
/ * * updateLEDs() - envía el LED indica en ledStates para el 74HC595 * secuencia * / void updateLEDs (int valor) {digitalWrite (pestillo, bajo); //Pulls el shiftOut bajo chips seguro (datos, reloj, MSBFIRST, valor); //Shifts a los 8 bits para el cambio registro digitalWrite (cierre, HIGH); //Pulls el pestillo alto mostrando los datos}
/ * * updateLEDsLong() - envía el LED indica en ledStates para el 74HC595 * secuencia. Igual a updateLEDs salvo que el desplazamiento se realiza en software * para que pueda ver lo que está sucediendo. * / void updateLEDsLong (int valor) {digitalWrite (pestillo, bajo); //Pulls los chips de enganche bajo para (int me = 0; me < 8; i ++) {//Will repetir 8 veces (una vez para cada bit) bit int = valor & B10000000; //We usar una "máscara" para seleccionar sólo el octavo //bit en nuestro número (el uno que nos dirigimos esta vez a través del valor = valor << 1; //we mover nuestro número de poco valor para la próxima vez bit 7 será //bit 8 y hacemos nuestras matemáticas en él if(bit == 128) {digitalWrite (datos, HIGH);} //if bit 8 es establecer entonces configurar nuestro datos pin alta else {digitalWrite (datos, LOW);} //if bit 8 está desactivada entonces configurar el pin de datos baja digitalWrite (reloj, alta); las siguientes tres líneas de pulso del reloj pin delay(1); digitalWrite (reloj, LOW); } digitalWrite (cierre, alta); tira el pestillo alto cambiando nuestros datos en se muestra}
Estos se utilizan en las matemáticas bit a bit que utilizamos para cambiar los LEDs //For más detalles http://en.wikipedia.org/wiki/Bitwise_operation int bits [] = {B00000001, B00000010, B00000100, B00001000, B00010000, B00100000, B01000000, B10000000}; máscaras de int [] = {B11111110, B11111101, B11111011, B11110111, B11101111, B11011111, B10111111, B01111111}; / * * changeLED (led int, int estado) cambia un LED individual * LEDs son 0 a 7 y estado es cualquiera 0 - OFF o 1 - * / void changeLED (int conducido, int estado) {ledState = ledState & máscaras [led]; //clears ledState de la broca nos centramos en if(state == ON) {ledState = ledState | bits [led];} //if la broca está en nosotros la añadiremos a ledState updateLEDs(ledState); //send el nuevo estado del LED para el cambio de registro}
Este es claramente el código más grande sin embargo ser más compleja y luego el otro hasta el momento, diseccionar el código por sí mismo esta vez escoger aparte en nuevas funciones que se enumeran, B00000001, B00000010 (códigos del pedacito) 01 siendo los 10 primeros, siendo la próxima etcétera etcétera, trate de conocer las principales 3 partes del IC chip pernos reloj de cierre de datos y donde se encuentran para futuros proyectos.
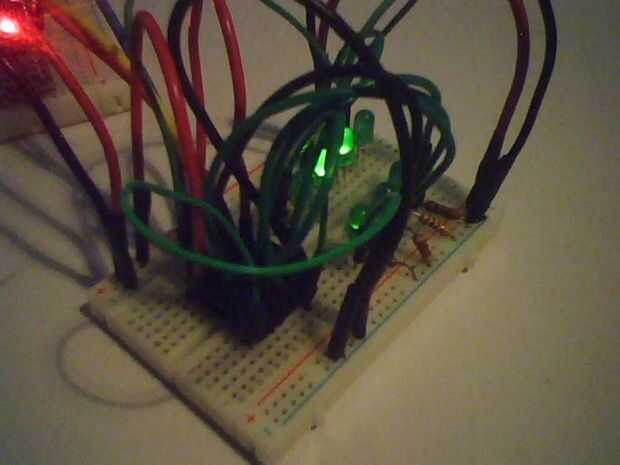
Animaciones se pueden descargar en línea el LED s hacen parpadear en cierta forma, trata de usar colores o multicolor LED como que no hizo, todo color, hace más fácil ver la animación y se ve mucho mejor también, asegúrese de que resistencias todas atadas a los LED están colocadas correctamente, a veces uno se moverá fuera de lugar mientras se conecta la masa de los cables de puente.
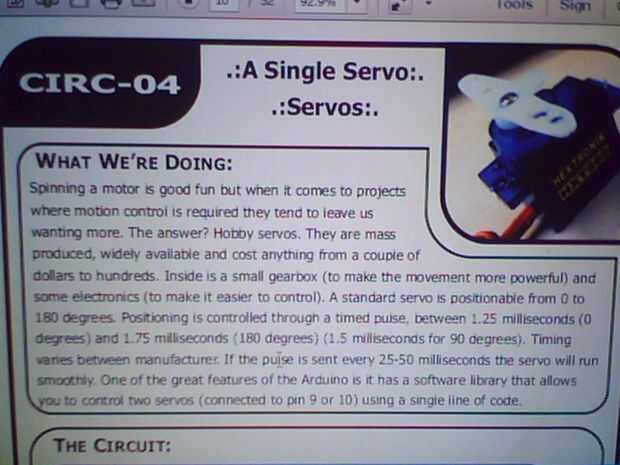
9 g SERVO CONTROL (usado comúnmente en robótica) 9g Servo Mini es algo fácil para establecer movimiento siendo programado en pulsos Revise que la hoja de datos de servos en línea para su tipo de servo, puede utilizarse en sistemas de localización robótica tal como sensor ultrasónico capacidad, cerraduras de puerta, movimiento articular y brazos de servo de eje utilizan en la fabricación de la fábrica y construcción totalmente automatizada en servo pre programado de dentro de estos pasos arms.less entonces generalmente esta vez como usted ya sabe cómo crear un circuito y subir programas para el IDE, como funciones de codificación así como básicas y mucho más.
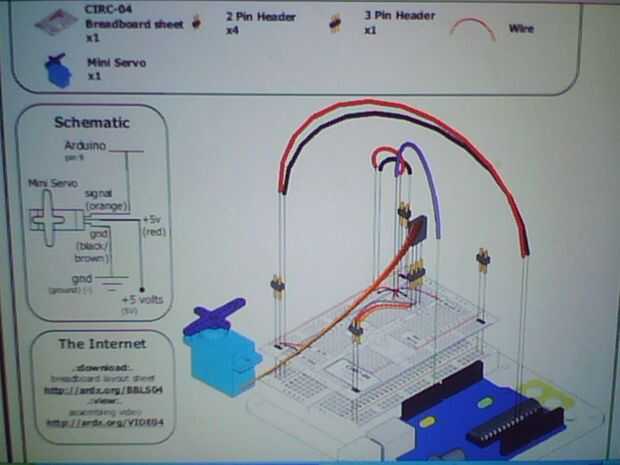
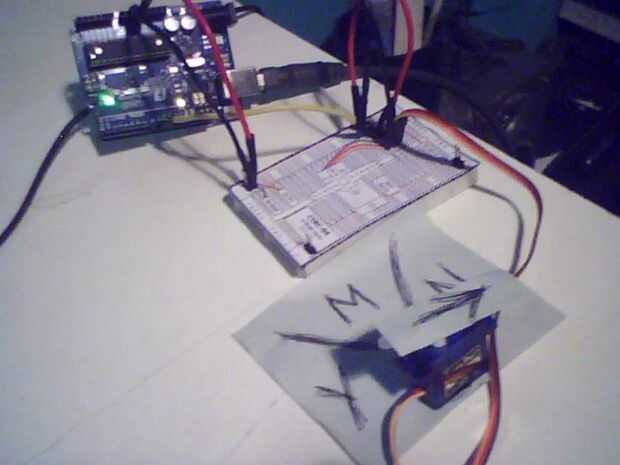
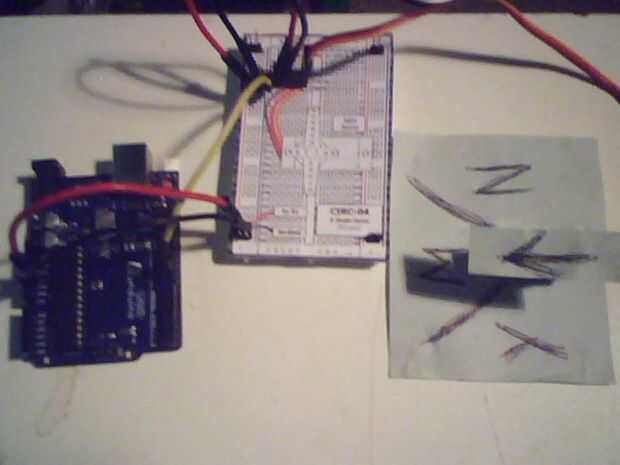
Configurar su Servo según las fotos publicada y añadir las etiquetas además para indicación visual del ángulo del servo una vez hecho esto ir al sitio principal de Arduino y busque la biblioteca de servo a ti mismo aprender a añadirlo por lectura hasta de biblioteca, una vez hecho esto y lo tienes agregado a ejemplos o sketchbook, mejor subir el "barrido" ejemplo que existe debe descargar esto con el fin de utilizar el código de abajo esta line___
#include servo myservo; crear objeto servo para controlar un servo / puede crear un máximo de ocho objetos de servo int pos = 0; variable para almacenar el servo posición void setup() {myservo.attach(9); / / conecta el servo en el pin 9 al objeto servo} void loop() {para (pos = 0; pos < 180; pos += 1) / / va desde 0 grados a 180 grados {/ / en pasos de 1 grado de myservo.write(pos); / / enviar a servo a la posición en la variable 'pos' delay(15); / / espera 15ms para el servo a la posición} para (pos = 180; pos > = 1; pos-= 1) / / va de 180 grados a 0 grados {myservo.write ( POS); Dile el servo a la posición en la variable 'pos' delay(15); espera 15ms para el servo a la posición}}
Jugar con el servo para un mientras, pueden atascarse ahora y después solo toque la parte superior vuelve a su punto de partida y pulse reset para reiniciar la biblioteca de codificación, el servo debe girar entonces 180degrees y la espalda, tratar de alterar la sincronización del pulso en pequeños incrementos hasta encontrar uno que funcione mejor para su servo, siguiente parte es bastante fácil gancho hasta una 10k potenciómetro para hacer esto Coloque el pote al pin analógico 0 así como atarla en-/ + conexiones/rieles en el protoboard con los cables de jumper ver mis fotos y videos para ver cómo conectado, o se refieren a su propia experiencia, la experimentación de ensayo y error es siempre mejor, encontrando hacia fuera para usted, sus sólo 3 cables y 3 para el servo que ya están conectados, figura el pinout de la olla por su muy simple de hacerlo mismo que funcionará si se ha llegado a esto ahora y todos los experimentos anteriores.







?")




")
