Introducción:
Se trata de una serie de tutoriales que muestran el uso a bordo de Intel Edison desarrollo alimentar motores de robótica Vex y la construcción de diferentes tipos de robots reales autónomos durante la serie. Parte de la serie también será un escaparate de cómo controlar los Robots remotamente desde un servidor de Internet en modo single o funcionalidad modo multi-player.
Se trata de un instructables en marcha en internet en tiempo real de cosas para los dispositivos conectados del edificio pero el enfoque aquí es uso de la Intel Edison en cambio tablero de regulador de Vex de MIT.
Se trata de una serie de diez 10 partes:
Parte 1: Introducción
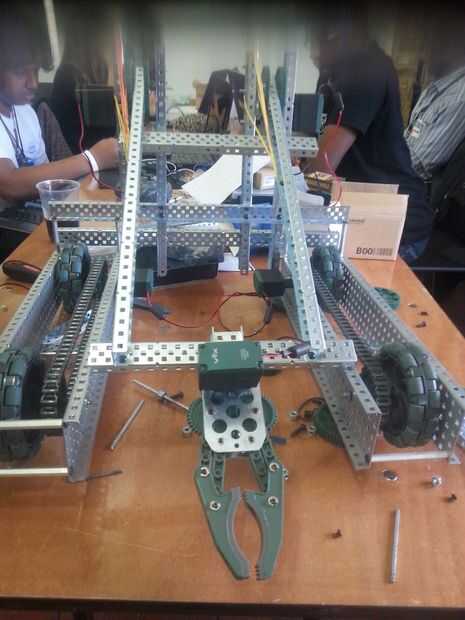
Parte 2: Robot edificio Bonaza
Parte 3: Tablero de Edison de Intel con interfaz de controlador de Motor L293D
Parte 4: Internet de las cosas: híbrido Intel Edison, CylonJS, BreakoutJs y Intel XDK IoT
Parte 5: Olvídese de los joystick, tráeme una aplicación
Parte 6: Imagen de sistemas personalizada Yocto construir entorno
Parte 7: Aplicaciones de Robot 1: agua buscando Robot
Parte 8: Aplicaciones de Robot 2: Robot asistivo (Inicio Mini Robot asistivo para personas mayores y movilidad ciudadana)
Parte 9: Aplicaciones de Robot 2: Robots colaborativos (inteligente auto programable ajuste de Robots)
Parte 10: Que, en conjunto: ampliar la plataforma de Edison Intel (portabilidad, Hacking, etc...)
En cuanto a la hardware, vamos a empezar con boards Intel Edison que fueron dadas a nosotros por Intel Corporation durante su reciente "IoT RoadShow en Londres" (13 de junio de 2015). Durante el evento de dos días, tenemos los chicos del colegio para hackear en el tablero compatible Intel Edison Arduino. Nos desarrollado con éxito dos conductores L293D DC Motor con placa Intel Edison Arduino para conducir un motores de cinco 5 Robot Vex reunido durante el hackathon de dos días. Nos sorprendió que Edison de Intel no sólo poder L293D de energía pero también sirve como un servidor de control y nos dio la oportunidad de poder desarrollar una aplicación móvil para reemplazar un joystick o palanca de mando accesorios nos ahorra más dinero. La aplicación fue capaz de controlar el Robot usando Wifi y Bluetooth, mientras que otras características como la geolocalización, mapas, giroscopio, rastreador de línea,-visión por computador, transmisión de datos que poco a poco se agregaron como plugins.
Esto es una prueba de conceptos, prácticas y serie de instructables sobre cómo construir y potencia tu propio Robot con la placa Intel Edison.
Desde el Edison de Intel se un completo incrustado Linux operando en su interior. Algunos del futuro plan también debe ser capaz de ejecutar ROS (robot operativo sistemas); MyRobotLab(Inmoov) y otras plataformas y puente con Libmraa de modo que pueda utilizar tablero de Edison de Intel dentro de sector de la educación para enseñar diseño, Mecatrónica, robótica y automatización.
