Paso 4: Conexión de l239d
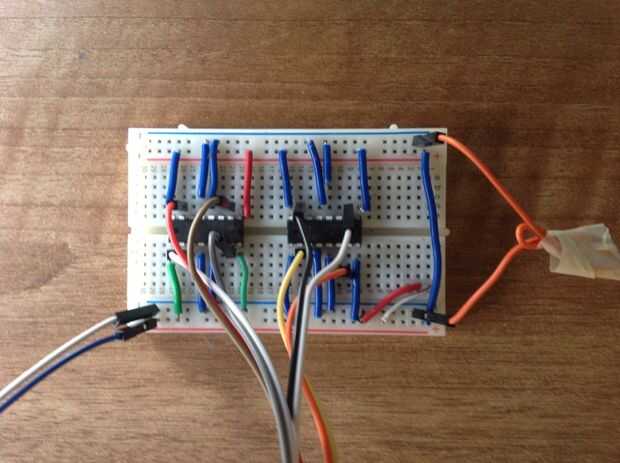
-1,8,16,9 al borne positivo de la batería
-4,5,12,13 a tierra
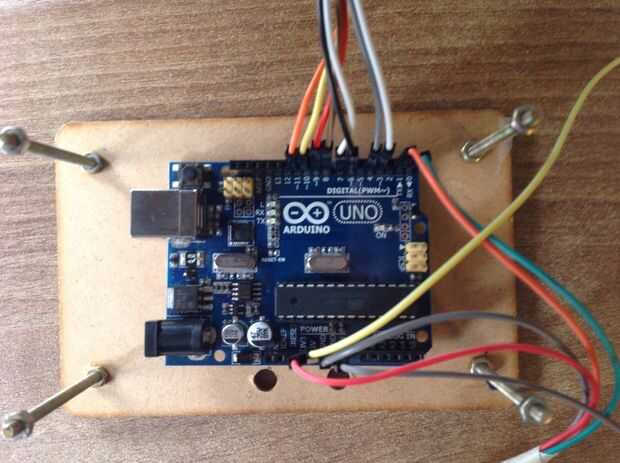
-2 al pin 3 Arduino
-7 al pin 4 Arduino
-15 al pin 8 Arduino
-10 al pin 9 del Arduino
-3,6,11, 14 motores de cuatro
Segundo l239d de conexión (todos los empalmes de la pierna)
-1,8,16,9 al borne positivo de la batería
-4,5,12,13 a tierra
-2 al pin 6 Arduino
-7 a pin 7 Arduino
-15 al pin 10 del Arduino
-10 al pin 11 Arduino
-3,6,11, 14 motores de cuatro