Paso 2: diseño de software
![]()
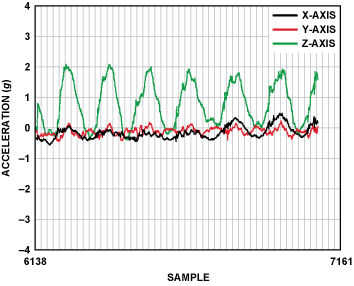
He pasado un poco de tiempo en investigar el algoritmo de podómetro. En el proceso de pruebas, descubrí que la acelere valor cuyo eje es vertical en el suelo tiene mayor rango de variación al caminar, por eso escribo mi código de acuerdo con esta idea. TT es bastante mala al principio pero mejor ahora. Subo mi código fuente para el github y lo puedes encontrar
aquí. Espero tener más chicos para ayudar con la actualización de este código :D