Paso 11: Los códigos de Arduino (C++) [actualizado! 04/09/13]
Actualizaciones:
31/08/13 - VNH5019 Dual chip (códigos) [Estado: ahora compatible!]
04/09/13 - controlador de Motor de Arduino DIY (códigos) [Estado: ahora compatible!]
pronto... - Arduino R3 Motor Shield (códigos) [Estado: fase Beta (inestable)]
pronto... - DX Dual VNH5019 clon (códigos) [Estado: experimentación en cola]
pronto... - DX R3 Motor clon escudo (códigos) [Estado: experimentación en cola]
Atención: Elija sus motor conductor códigos de abajo!
-Doble chip VNH5019--- [Descargar: Arduino Bluetooth (para doble chip VNH5019) .rar]
-Motor de Arduino DIY escudo--- [ Descargar: Arduino Bluetooth (para bricolaje Motor Shield) .rar]
- Los códigos originales ---[Descargar: Bluetooth RC códigos]
_________________________________________________________________________________________
Reconstruido por: Angelo Casimiro (ASCAS)
#include "DualVNH5019MotorShield.h"
DualVNH5019MotorShield md;
char dataIn = de '; determinante de char, char det; vel int = 0; Cosas de Bluetooth
int potencia = 4; Eliminar esto para activar el conmutador de Tollge #2
overdrive de int = 13; Pulsa el interruptor #1, el pin13 LED se encenderá
void setup() {}
Serial.Begin(9600);MD.init();
/ * pinMode (potencia, salida); * //toggle interruptor de función
pinMode (overdrive, salida);
}
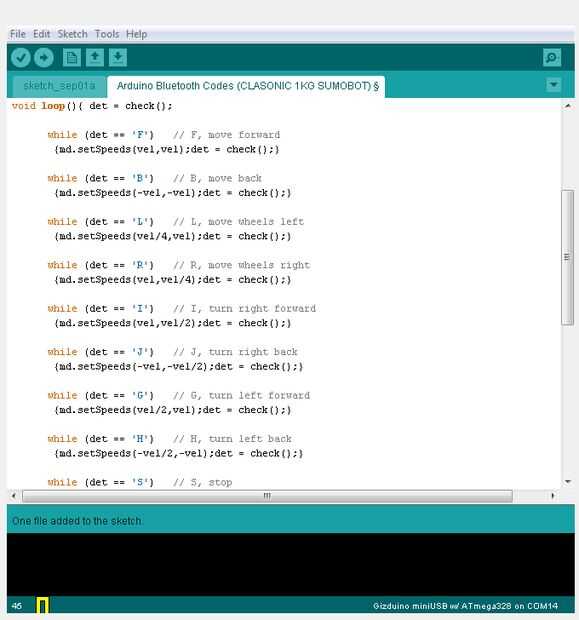
void loop() {det = check(); Necesidad de podr reconstruir esto si el no usa el VNH5019 doble chip
mientras que (det == 'F') / / F, avanzar
{md.setSpeeds (vel, vel); det = check();}
mientras que (det == 'B') / / B, retroceder
{md.setSpeeds (- vel, - vel); det = check();}
mientras que (det == 'L') / / L, ruedas de movimiento a la izquierda
{md.setSpeeds (vel/4 vel); det = check();}
mientras que (det == 'R') / / R, ruedas de movimiento derecha
{md.setSpeeds (vel vel/4); det = check();}
mientras que (det == 'I') / / I, girar a la derecha hacia delante
{md.setSpeeds (vel vel/2); det = check();}
mientras que (det == 'J') / / J, girar a la derecha de nuevo
{md.setSpeeds (- vel, - vel/2); det = check();}
mientras que (det == 'G') / / G, girar a la izquierda hacia delante
{md.setSpeeds (vel vel/2,); det = check();}
mientras que (det == 'H') / / H, girar a la izquierda detrás
{md.setSpeeds (vel - vel/2,-); det = check();}
mientras que (det == de ') / / S, parada
{md.setSpeeds (0,0); det = check();}
---Interruptor código---/ /
/ * mientras (det == 'U')
{digitalWrite (energía, HIGH); det = check();}
mientras que (det == 'u')
{digitalWrite (energía, LOW); det = check();} */
//---------------------Mains Power------------------//
mientras que (det == 'W')
{digitalWrite (overdrive, HIGH); det = check();}
mientras que (det == 'w')
{digitalWrite (overdrive, LOW); det = check();}
}
check() int
{Si (Serial.available() > 0) {dataIn = Serial.read();
Si (dataIn == 'F') {determinante = 'F';}
else if (dataIn == 'B') {determinante = 'B';} else if (dataIn == 'L') {determinante = 'L';}
else if (dataIn == 'R') {determinante = 'R';} else if (dataIn == 'I') {determinante = 'I';}
else if (dataIn == 'J') {determinante = 'J';} else if (dataIn == 'G') {determinante = 'G';}
else if (dataIn == 'H') {determinante = 'H';} else if (dataIn == de ') {determinante = de ';}
else if (dataIn == '0') {vel = 400;} else if (dataIn == '1') {vel = 380;}
else if (dataIn == '2') {vel = 340;} else if (dataIn == '3') {vel = 320;}
else if (dataIn == '4') {vel = 280;} else if (dataIn == '5') {vel = 240;}
else if (dataIn == '6') {vel = 200;} else if (dataIn == '7') {vel = 160;}
else if (dataIn == '8') {vel = 120;} else if (dataIn == '9') {vel = 80;}
else if (dataIn == 'q') {vel = 40;} else if (dataIn == 'U') {determinante = 'U';}
else if (dataIn == 'u') {determinante = 'u';} else if (dataIn == 'W') {determinante = 'W';}
else if (dataIn == 'w') {determinante = 'w' ;}} volver determinante;}


![[Rokit Smart] Robot de sumo](https://foto.askix.com/thumb/170x110/4/d7/4d7c9ab4c1ee59b03b3bcab96c8e72a7.jpg "[Rokit Smart] Robot de sumo")

")








