Paso 12: optimización


A veces la perfección
diseño optimizado que tienes en tu cabeza tiene que llegar a un compromiso cuando se trata de la realidad. Nos esforzamos para la perfección, pero de vez en cuando algunas ideas que haz puesto en un segundo plano para el siguiente proyecto. Con este brazo robótico estábamos restringidos a utilizar una batería de 12 voltios o menos como según las reglas en el comienzo de la temporada. Trabajar con nuestro tipo recomendado: batería de Ion de litio, debido a su alta densidad de potencia, tenía un voltaje de la batería de 11,1 voltios nominales. En nuestra situación nos originalmente planeaba usar los 3 AnyVolt de dimensión ingeniería para aumentar el voltaje de la batería a 14,8 voltios para conducir mejor los servos de codo. Los servos del codo fueron nuestra inversión más grande y queríamos sacarle el máximo partido de ellos. Un aumento de 3,7 voltios no puede sonar como asignar, pero un aumento de 32 por ciento de par nos habría dado una ventaja contra el tiempo de la competencia de 3 minutos. Después de 2 meses de construcción y diseño que se publicó una aclaración de la regla nos excluida de usar cualquier convertidor que puede ajustar la tensión de 12 voltios. Esta idea tuvo que ser desechado con el temor de ser descalificado. Estos inversores suponen un y son increíblemente eficientes en compasión a su tamaño. Estamos utilizando el AnyVolt3 para nuestra investigación en servos Dynamixel incluyendo la nueva línea Pro.
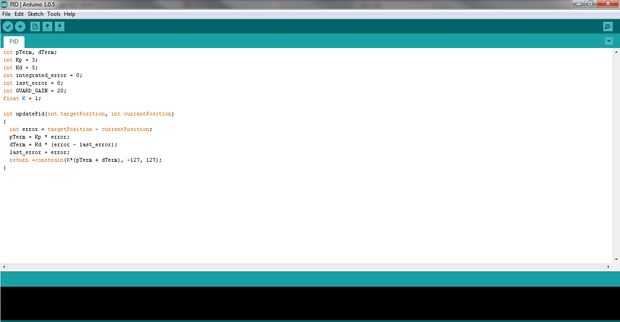
Montado y funcionando, era tiempo para calibrar el control PD para el motor base. Este control de la velocidad a la que el brazo swing a una posición especificada y reducir la cantidad de reacción de la repentina del motor. Puesto que no tenemos ningún tipo de forma de ajustar fácilmente los valores, tenemos que cambiar el valor en el código y volver a subir cada vez que hicimos el cambio. Empezamos girando el valor de P primera a un nivel que nos encontramos cómodos con. Entonces, hemos ajustado el valor de D hasta que se movió muy bien como queríamos que. No había método mucho a lo que hicimos, por lo que solo jugaba con los valores hasta que nos gustó.
La fuerza de agarre de la garra era demasiado alta al principio. Sobre objetos duros, trataría de exceso de par sí mismo y el servo dejaría de responder para conservar su vida. Para solucionar esto, a editado el ajuste del esfuerzo de torsión máximo en el servo de garra. Tada, problema resuelto.
Nuestro brazo extensor fue limitado principalmente por la cantidad de tubos que podríamos encontrar para caber dentro de otras. Que terminó siendo de 7 tubos y podría alcanzar unos 18 pies. La más arriba tiene, obviamente, el menos estable es. En extensión completa, la parte superior del brazo se balancean alrededor de dos pies hacia adelante y hacia atrás y sería muy difícil para los jueces medir.













