Paso 1: Paso 1: construir la tabla de Hockey de aire

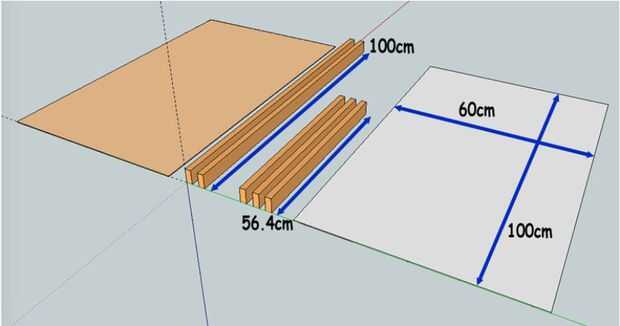



1. Ensamble el marco con listones de madera como se muestra en la imagen. Utilice tornillos de 3x30mm para fijar los listones, un tornillo en los extremos y dos tornillos en el refuerzo central. Siempre es preferible para marcar antes con un lápiz, luego perfore con una mechas de 1,5 mm (para evitar la rotura de la madera) y luego inserte los tornillos. Utilice uno de los tableros de 100x60cm para asegurarse de que colocarla correctamente alineado. La cabeza no debe sobresalir más allá de la madera, tornillo les hasta que están totalmente incrustados en la madera.
2 tornillo de la Junta de 100x60cm al marco con algunos tornillos 2.5x16 (ver foto). Empezar a colocar tornillos de vuelta de la esquina a 3cm del borde y luego aproximadamente a 20cm de distancia (medir y hacer marcas en primer lugar, luego perforar con mechas de 1,5 mm y luego inserte los tornillos)
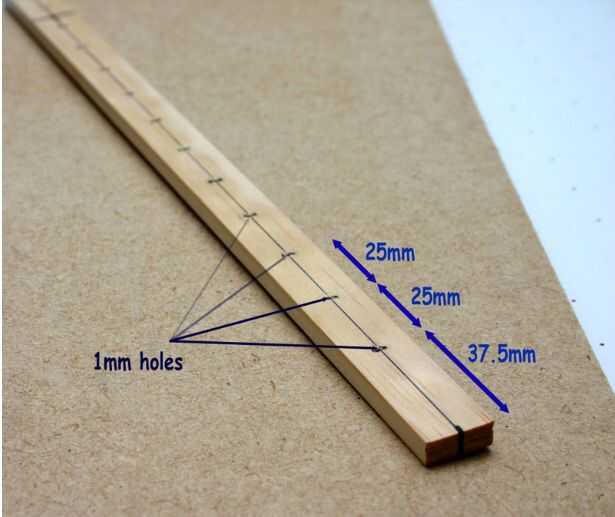
3 ahora it´s tiempo para abrir los agujeros de aire en la tabla. Vamos a preparar a una guía de madera. La guía será un listón de madera de 60x18x5mm con los agujeros. Primero vamos a marcar la posición de los agujeros. Dejar un espacio de 3,75 cm en los bordes y luego marque cada 2,5 cm. En total debemos tener 22 marcas. Ahora hacemos los agujeros con mechas de 1mm (Asegúrese que el taladro esté bien nivelado)
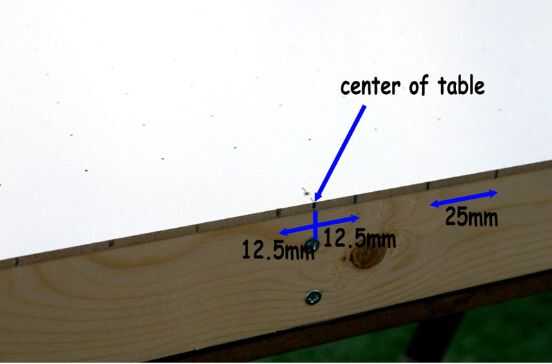
4 ahora it´s tiempo para hacer las marcas en las bridas de junta. Importante, comienzo desde el centro de la mesa (medirlo) y hacer la primera marca en 12,5 mm a cada lado del centro de la mesa. La idea es que en el centro no haremos los agujeros porque tenemos el listón de madera de centro. Ahora hacer marcas en el tablero cada 25mm hasta el borde donde dejaremos una separación de unos 6cm. Tenemos un total de 36 marcas de la tabla (18 a cada lado del centro)
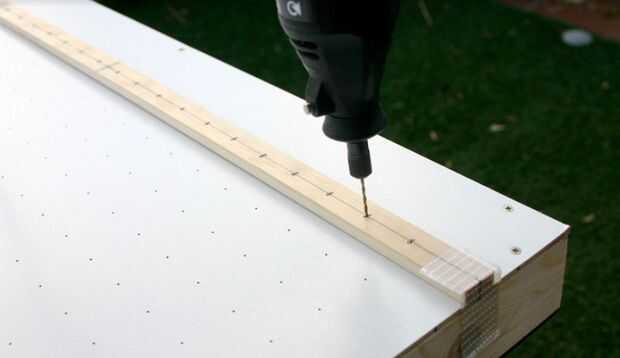
5. Coloque la guía de alineado con las marcas, fije con cinta a cada lado, presione a la guía contra la mesa con la mano y comenzó a taladrar los agujeros con las mechas de 1mm (22 en cada fila). Mueva a la guía hasta la siguiente marca, asegúrelo con la cinta otra vez y seguir haciendo los agujeros... Parece un trabajo enorme pero it´s no es tan difícil (menos de 40 minutos)
Consejo: Preparar todo para estar en una postura cómoda y alta.
6 una vez terminado los agujeros en la tabla, cubrimos los listones en la parte trasera de la mesa con tiras de aislamiento de espuma o goma EVA.
7. Cierre la tabla en la parte trasera con la pistola de pegamento caliente para que el aire podría no escape.8.On la otra tabla de 100x60cm, prepararemos los grandes agujeros para los ventiladores. Marque una línea en el centro de la mesa. Marque con un lápiz los ventiladores en el centro de la mesa. a 19 cm de la línea central.
9. Perfore los orificios para los tornillos del ventilador M4 y también abrir un agujero para insertar la hoja de la Sierra de vaivén. Con el juego (o sierra de marquetería) abrir el orificio central de cada ventilador.
10 ahora es el momento para preparar a los lados de hockey para ello tomamos los listones de 12 x 18 y cortar las siguientes medidas:
2 90 cm para los lados
4 12 cm para las piezas posteriores, junto a los objetivos
4 6cm para las esquinas
11 ahora nos podemos atornillar en la parte superior de la tabla. Como siempre primera medida, marcar, perforar un agujero y luego inserte los tornillos de 3 x 30. Comenzamos con los dos lados largos (90cm), a continuación, las piezas de la espalda y las esquinas.






")






